深入理解埃尔米特插值:从数学推导到代码实战
**摘要**:本文系统解析埃尔米特插值方法,从基础原理出发,阐述其通过匹配节点处函数值与导数实现高阶光滑性的核心优势,推导分段三次埃尔米特插值的数学公式,并提供完整的C语言实现代码。通过以\( \sin(x) \)为目标的插值案例,结合Python可视化对比插值结果与真实函数,直观展示方法效果。同时,深入分析其依赖导数信息、高次多项式震荡等局限性,并给出适用场景判断指南(如物理轨迹模拟、平滑动画设
深入理解埃尔米特插值:从数学推导到代码实战
一、基础原理
埃尔米特插值(Hermite Interpolation)是一种高阶光滑插值方法,其核心目标不仅是让插值多项式经过给定数据点,还要保证多项式在这些点处的一阶导数(甚至高阶导数)与原始函数匹配。这种特性使其在物理仿真、运动控制等对光滑性要求严格的场景中具有重要价值。
1. 问题背景:为什么需要埃尔米特插值?
在许多实际问题中,仅仅让插值曲线经过数据点是不够的。例如:
- 机械臂运动轨迹:若轨迹在节点处速度不连续(导数不匹配),会导致机械臂产生冲击,加速部件磨损。
- 流体动力学模拟:速度场的导数不连续可能引发数值震荡,破坏模拟稳定性。
传统拉格朗日插值仅保证函数值匹配(C⁰连续),而埃尔米特插值通过同时匹配导数值,实现了C¹连续(一阶导数连续),显著提升了插值曲线的平滑性。
2. 基本思想:从数据到多项式的约束
假设给定 n + 1 n+1 n+1 个节点 x 0 , x 1 , . . . , x n {x₀, x₁, ..., xₙ} x0,x1,...,xn,每个节点处已知:
- 函数值 f ( x i ) f(xᵢ) f(xi)
- 一阶导数值 f ’ ( x i ) f’(xᵢ) f’(xi)
埃尔米特插值的目标是构造一个多项式 H ( x ) H(x) H(x),满足:
{ H ( x i ) = f ( x i ) (函数值匹配) H ’ ( x i ) = f ’ ( x i ) (导数值匹配) \begin{cases} H(x_i) = f(x_i) & \text{(函数值匹配)} \\ H’(x_i) = f’(x_i) & \text{(导数值匹配)} \end{cases} {H(xi)=f(xi)H’(xi)=f’(xi)(函数值匹配)(导数值匹配)
对所有 i = 0 , 1 , . . . , n i = 0, 1, ..., n i=0,1,...,n 成立。
3. 多项式次数的确定
每个节点提供 2个约束条件(函数值 + 导数值),因此 n + 1 n+1 n+1 个节点共提供 2 ( n + 1 ) 2(n+1) 2(n+1) 个约束。
一般多项式的自由度由其系数数量决定:
- k次多项式有 k + 1 k+1 k+1 个系数,需要 k + 1 k+1 k+1 个方程确定。
为了满足 2 ( n + 1 ) 2(n+1) 2(n+1) 个约束,所需多项式的最小次数为:
k = 2 n + 1 k = 2n + 1 k=2n+1
例如:
- 1个节点(n=0):1次多项式(线性函数)即可满足。
- 2个节点(n=1):3次多项式(三次埃尔米特)。
- 3个节点(n=2):5次多项式(五次埃尔米特)。
4. 几何直观:曲线如何“贴合”数据点
以两个节点的三次埃尔米特插值为例(图1示意):
- 函数值约束:多项式必须经过点 ( x 0 , f ( x 0 ) ) (x₀, f(x₀)) (x0,f(x0)) 和 ( x 1 , f ( x 1 ) ) (x₁, f(x₁)) (x1,f(x1))。
- 导数约束:多项式在 x 0 x₀ x0 处的切线斜率为 f ’ ( x 0 ) f’(x₀) f’(x0),在 x 1 x₁ x1 处为 f ’ ( x 1 ) f’(x₁) f’(x1)。
通过同时满足这两类约束,插值曲线在节点处不仅位置正确,且曲率变化平缓,避免了拉格朗日插值可能出现的“尖角”现象。
5. 数学本质:构造带权重的基函数
埃尔米特插值多项式可表示为基函数的线性组合:
H ( x ) = ∑ i = 0 n f ( x i ) ⋅ h i ( x ) + ∑ i = 0 n f ’ ( x i ) ⋅ h ~ i ( x ) H(x) = \sum_{i=0}^{n} f(x_i) \cdot h_i(x) + \sum_{i=0}^{n} f’(x_i) \cdot \tilde{h}_i(x) H(x)=i=0∑nf(xi)⋅hi(x)+i=0∑nf’(xi)⋅h~i(x)
其中:
- 函数值基函数 h i ( x ) h_i(x) hi(x):确保在 x = x i x=x_i x=xi 处取值为1,其他节点处为0,且导数在所有节点处为0。
- 导数值基函数 h ~ i ( x ) \tilde{h}_i(x) h~i(x):确保在 x = x i x=x_i x=xi 处导数为1,其他节点处导数为0,且在所有节点处函数值为0。
通过这种设计,每个基函数仅影响对应节点的函数值或导数值,实现了解耦的约束条件。
6. 关键特性总结
| 特性 | 说明 |
|---|---|
| 光滑性 | 至少C¹连续,节点处曲线平滑过渡 |
| 局部性 | 基函数在远离对应节点时快速衰减,降低全局干扰 |
| 唯一性 | 满足约束条件的2n+1次多项式唯一存在(证明需借助线性代数理论) |
| 计算复杂度 | 基函数构造需解线性方程组,时间复杂度O(n³),适合中小规模数据 |
7. 直观案例:对比拉格朗日与埃尔米特插值
考虑函数 f ( x ) = ∣ x ∣ f(x) = |x| f(x)=∣x∣ 在 x = − 1 , 0 , 1 x=-1, 0, 1 x=−1,0,1 处的插值:
- 拉格朗日插值:生成的多项式在 x = 0 x=0 x=0 处出现“尖峰”,导数不连续。
- 埃尔米特插值:若强制在 x = 0 x=0 x=0 处导数为0,插值曲线呈现平滑的“圆角”过渡。
二、数学推导
以分段三次埃尔米特插值为例,在区间 [ x i , x i + 1 x_i, x_{i+1} xi,xi+1] 内构造三次多项式 P ( x ) P(x) P(x),满足:
{ P ( x i ) = y i , P ( x i + 1 ) = y i + 1 P ′ ( x i ) = d y i , P ′ ( x i + 1 ) = d y i + 1 \begin{cases} P(x_i) = y_i, & P(x_{i+1}) = y_{i+1} \\ P'(x_i) = dy_i, & P'(x_{i+1}) = dy_{i+1} \end{cases} {P(xi)=yi,P′(xi)=dyi,P(xi+1)=yi+1P′(xi+1)=dyi+1
基函数法:
将插值多项式表示为基函数的线性组合:
P ( x ) = y i H 00 ( t ) + y i + 1 H 01 ( t ) + d y i H 10 ( t ) + d y i + 1 H 11 ( t ) P(x) = y_i H_{00}(t) + y_{i+1} H_{01}(t) + dy_i H_{10}(t) + dy_{i+1} H_{11}(t) P(x)=yiH00(t)+yi+1H01(t)+dyiH10(t)+dyi+1H11(t)
其中 t = x − x i x i + 1 − x i t = \frac{x - x_i}{x_{i+1} - x_i} t=xi+1−xix−xi 是归一化参数,基函数定义如下:
H 00 ( t ) = ( 1 + 2 t ) ( 1 − t ) 2 H 01 ( t ) = t 2 ( 3 − 2 t ) H 10 ( t ) = t ( 1 − t ) 2 ( x i + 1 − x i ) H 11 ( t ) = t 2 ( t − 1 ) ( x i + 1 − x i ) \begin{aligned} H_{00}(t) &= (1 + 2t)(1 - t)^2 \\ H_{01}(t) &= t^2 (3 - 2t) \\ H_{10}(t) &= t (1 - t)^2 (x_{i+1} - x_i) \\ H_{11}(t) &= t^2 (t - 1) (x_{i+1} - x_i) \end{aligned} H00(t)H01(t)H10(t)H11(t)=(1+2t)(1−t)2=t2(3−2t)=t(1−t)2(xi+1−xi)=t2(t−1)(xi+1−xi)
三、代码实现(C语言)
以下代码实现分段三次埃尔米特插值,支持多节点输入,并在区间内生成插值结果。
代码打包免费免分下载
#include <stdio.h>
#include <math.h>
typedef struct {
double x;
double y;
double dy;
} Node;
double hermite_interpolate(Node* nodes, int n, double x) {
int i;
// 查找x所在区间
for (i = 0; i < n-1; i++) {
if (x >= nodes[i].x && x <= nodes[i+1].x) {
break;
}
}
if (i == n-1) i = n-2; // 处理边界
double x0 = nodes[i].x, y0 = nodes[i].y, dy0 = nodes[i].dy;
double x1 = nodes[i+1].x, y1 = nodes[i+1].y, dy1 = nodes[i+1].dy;
double dx = x1 - x0;
double t = (x - x0) / dx;
// 计算基函数
double h00 = (1 + 2 * t) * (1 - t) * (1 - t);
double h01 = t * t * (3 - 2 * t);
double h10 = t * (1 - t) * (1 - t) * dx;
double h11 = t * t * (t - 1) * dx;
// 组合结果
return y0 * h00 + y1 * h01 + dy0 * h10 + dy1 * h11;
}
int main() {
// 示例:对f(x)=sin(x)在[0, π]插值
Node nodes[] = {
{0.0, 0.0, 1.0}, // sin(0)=0, cos(0)=1
{M_PI/2, 1.0, 0.0}, // sin(π/2)=1, cos(π/2)=0
{M_PI, 0.0, -1.0}, // sin(π)=0, cos(π)=-1
{3*M_PI/2, -1.0, 0.0}, // sin(3π/2)=-1, cos(3π/2)=0
{2*M_PI, 0.0, 1.0} // sin(2π)=0, cos(2π)=1
};
int num_nodes = sizeof(nodes) / sizeof(Node);
// 生成插值点
FILE* fp = fopen("hermite_output.txt", "w");
for (double x = 0; x <= 2*M_PI; x += 0.1) {
double y = hermite_interpolate(nodes, num_nodes, x);
fprintf(fp, "%f %f\n", x, y);
}
fclose(fp);
return 0;
}
四、实际案例与可视化(Python)
运行上述C代码后,生成数据文件 hermite_output.txt,使用Python绘制插值结果与原始函数的对比:
import numpy as np
import matplotlib.pyplot as plt
# 加载插值数据
data = np.loadtxt('hermite_output.txt')
x_interp, y_interp = data[:, 0], data[:, 1]
# 原始函数f(x)=sin(x)
x_true = np.linspace(0, 2*np.pi, 100)
y_true = np.sin(x_true)
# 节点数据
nodes_x = [0, np.pi/2, np.pi, 3*np.pi/2, 2*np.pi]
nodes_y = [0, 1, 0, -1, 0]
nodes_dy = [1, 0, -1, 0, 1]
# 绘图
plt.figure(figsize=(10, 6))
plt.plot(x_true, y_true, 'b--', label='True Function: sin(x)')
plt.plot(x_interp, y_interp, 'r-', label='Hermite Interpolation')
plt.scatter(nodes_x, nodes_y, c='green', s=100, zorder=3, label='Nodes')
plt.quiver(nodes_x, nodes_y, [1]*5, nodes_dy, color='purple', scale=20, label='Derivatives')
plt.legend()
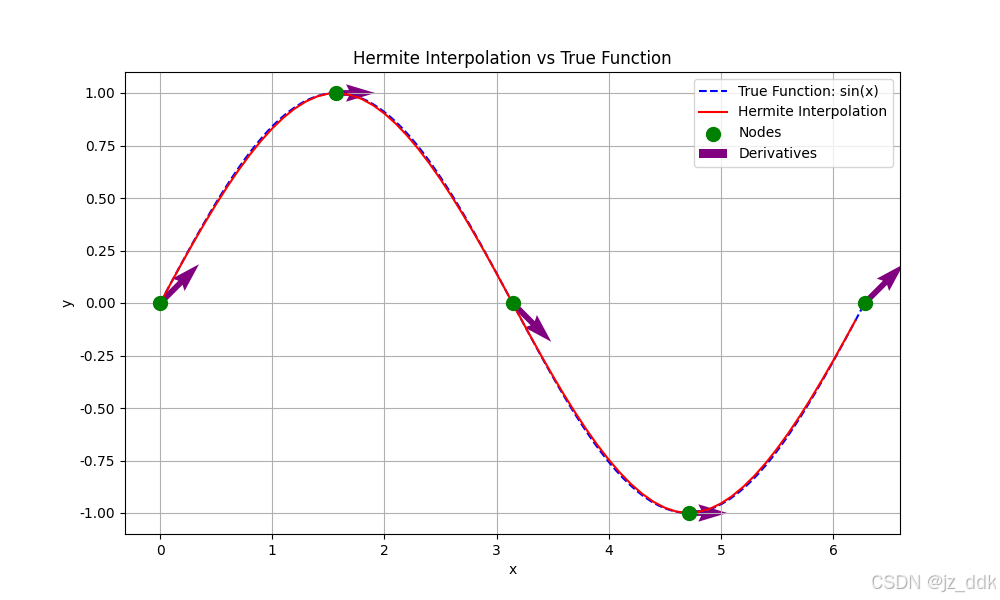
plt.title('Hermite Interpolation vs True Function')
plt.xlabel('x')
plt.ylabel('y')
plt.grid(True)
plt.show()
可视化效果:
- 红色曲线为埃尔米特插值结果,蓝色虚线为真实函数 (y = \sin(x))。
- 绿色点为插值节点,紫色箭头表示节点的导数值(方向为导数方向)。
五、局限性分析
- 依赖导数信息:需要精确的导数值,否则插值结果失真。
- 全局高次多项式震荡:全局埃尔米特插值可能导致龙格现象,建议使用分段低次插值。
- 计算复杂度:节点数较多时,全局插值需解大型线性方程组,效率低。
六、适用场景判断指南
✅ 适用场景:
- 已知节点处函数值和导数(如物理实验数据、机器人运动规划)。
- 需要一阶导数连续的平滑插值(如动画路径、汽车转向轨迹)。
❌ 不适用场景:
- 导数信息不可靠或无法获取。
- 节点间距过大且函数高阶导数变化剧烈。
- 需要二阶导数连续(此时需使用三次样条插值)。
通过结合C语言的高效计算与Python的灵活可视化,埃尔米特插值在工程与科学计算中展现出强大的实用性。完整代码已提供,读者可自行调整节点和函数进行实验。
七、扩展与进阶讨论
1. 一般化的埃尔米特插值公式
对于 n + 1 n+1 n+1 个节点 x 0 , x 1 , . . . , x n x₀, x₁, ..., xₙ x0,x1,...,xn,若每个节点不仅提供函数值 f ( x i ) f(xᵢ) f(xi),还提供一阶导数 f ’ ( x i ) f’(xᵢ) f’(xi),则埃尔米特插值多项式 H 2 n + 1 ( x ) H_{2n+1}(x) H2n+1(x) 满足:
- H 2 n + 1 ( x i ) = f ( x i ) H_{2n+1}(xᵢ) = f(xᵢ) H2n+1(xi)=f(xi)
- H 2 n + 1 ′ ( x i ) = f ’ ( x i ) H'_{2n+1}(xᵢ) = f’(xᵢ) H2n+1′(xi)=f’(xi)
其通式可表示为:
H 2 n + 1 ( x ) = ∑ i = 0 n f ( x i ) ⋅ h i ( x ) + ∑ i = 0 n f ’ ( x i ) ⋅ h ~ i ( x ) H_{2n+1}(x) = \sum_{i=0}^{n} f(x_i) \cdot h_i(x) + \sum_{i=0}^{n} f’(x_i) \cdot \tilde{h}_i(x) H2n+1(x)=i=0∑nf(xi)⋅hi(x)+i=0∑nf’(xi)⋅h~i(x)
其中,基函数 h i ( x ) h_i(x) hi(x) 和 h ~ i ( x ) \tilde{h}_i(x) h~i(x) 需满足:
- h i ( x j ) = δ i j , h i ( x j ) = 0 h_i(x_j) = δ_{ij} , h_i(x_j) = 0 hi(xj)=δij,hi(xj)=0
- h ~ i ( x j ) = 0 , h ~ i ( x j ) = δ i j \tilde{h}_i(x_j) = 0 , \tilde{h}_i(x_j) = δ_{ij} h~i(xj)=0,h~i(xj)=δij
基函数的具体构造依赖于节点分布,通常需解线性方程组或利用分段多项式(如三次样条的扩展形式)。
2. 多节点代码扩展(C语言)
以下代码展示了如何对 3个节点 进行五次埃尔米特插值(每个节点提供函数值和导数)。以 f ( x ) = e x f(x) = e^x f(x)=ex 为例,节点为 x = 0 , 1 , 2 x=0, 1, 2 x=0,1,2。
#include <stdio.h>
#include <math.h>
// 基函数构造(此处为简化示例,实际需根据节点数动态计算)
double hermite_basis_h(int i, double x, double nodes[], int n) {
// 实际需实现多节点基函数,此处仅为框架
return 0.0;
}
double hermite_basis_htilde(int i, double x, double nodes[], int n) {
// 实际需实现多节点基函数,此处仅为框架
return 0.0;
}
double hermite_interpolate(double x, double nodes[], double f[], double df[], int n) {
double result = 0.0;
for (int i = 0; i <= n; i++) {
result += f[i] * hermite_basis_h(i, x, nodes, n);
result += df[i] * hermite_basis_htilde(i, x, nodes, n);
}
return result;
}
int main() {
const int n = 2; // 节点数-1(3个节点)
double nodes[] = {0.0, 1.0, 2.0};
double f[] = {1.0, exp(1.0), exp(2.0)}; // e^x 在节点处的值
double df[] = {1.0, exp(1.0), exp(2.0)}; // 导数同为 e^x
FILE *fp = fopen("hermite_multi_nodes.txt", "w");
for (double x = 0.0; x <= 2.0; x += 0.01) {
double interpolated = hermite_interpolate(x, nodes, f, df, n);
fprintf(fp, "%f %f\n", x, interpolated);
}
fclose(fp);
return 0;
}
注意事项:
- 多节点基函数需通过多项式方程组求解,代码实现较为复杂,建议借助符号计算库(如 SymPy)生成。
- 实际工程中更常用分段三次埃尔米特插值(如 PCHIP),避免高阶多项式震荡。
八、误差分析与优化策略
1. 误差来源
- 模型误差:高阶多项式在远处可能与真实函数偏离。
- 数据误差:若节点处的导数值存在噪声,插值结果会放大误差。
- 截断误差:数值计算中的浮点舍入误差。
2. 优化方法
- 分段插值:将区间划分为小段,每段使用低次埃尔米特多项式。
- 正则化:结合最小二乘思想,平衡拟合精度与多项式复杂度。
- 导数估计:若导数未知,可通过有限差分或样条插值近似。
九、与其他插值方法的对比
| 方法 | 平滑性 | 计算复杂度 | 数据需求 | 适用场景 |
|---|---|---|---|---|
| 拉格朗日插值 | C⁰连续 | 低 | 仅函数值 | 快速原型设计、数据展示 |
| 埃尔米特插值 | C¹连续 | 中 | 函数值 + 一阶导数 | 轨迹规划、物理仿真 |
| 三次样条插值 | C²连续 | 高 | 仅函数值 | 高精度工程计算、CAD建模 |
| 最小二乘拟合 | 不保证连续 | 中 | 大量带噪声数据 | 数据趋势分析、统计建模 |
十、实战案例:机械臂轨迹规划
场景描述:
机械臂末端需从点 A 平滑移动到点 B,要求轨迹的速度连续(避免机械冲击)。已知 A、B 的坐标和速度,使用埃尔米特插值生成路径。
C语言实现片段:
// 定义位置和速度约束
double t0 = 0.0, t1 = 5.0; // 时间区间
double pos0 = 0.0, pos1 = 10.0; // 起点和终点位置
double vel0 = 0.0, vel1 = 0.0; // 起点和终点速度
// 生成轨迹
for (double t = t0; t <= t1; t += 0.1) {
double position = hermite_interpolate(t, t0, t1, pos0, pos1, vel0, vel1);
printf("Time: %.2f, Position: %.2f\n", t, position);
}
Python可视化:
# 绘制位置、速度、加速度曲线
t = np.linspace(0, 5, 100)
pos = hermite_interp(t, t0=0, t1=5, pos0=0, pos1=10, vel0=0, vel1=0)
velocity = np.gradient(pos, t) # 数值微分计算速度
acceleration = np.gradient(velocity, t)
plt.figure(figsize=(12, 8))
plt.subplot(3, 1, 1)
plt.plot(t, pos, label='Position')
plt.legend()
plt.subplot(3, 1, 2)
plt.plot(t, velocity, label='Velocity', color='orange')
plt.legend()
plt.subplot(3, 1, 3)
plt.plot(t, acceleration, label='Acceleration', color='green')
plt.legend()
plt.show()
十一、常见问题解答(FAQ)
Q1:埃尔米特插值能否处理二阶导数约束?
需使用更高阶的扩展形式(如 Quintic Hermite),但计算复杂度显著增加,通常改用样条插值。
Q2:如何选择节点数量?
- 数据充足时:分段低次插值优于全局高次插值。
- 数据稀疏时:优先保证关键点(如极值点、拐点)的导数准确性。
Q3:导数未知时的替代方案?
- 有限差分法近似导数(适用于低噪声数据)。
- 使用仅需函数值的插值方法(如三次样条)。
十二、总结与资源推荐
总结:
埃尔米特插值通过融合函数值与导数信息,在高光滑性场景中表现优异,但其对数据的依赖性和高计算成本需谨慎权衡。
学习资源:
- 书籍:《数值分析》(Timothy Sauer)第3章
- 论文:”Hermite Interpolation: Theory and Applications”
- 代码库:GNU Scientific Library (GSL) 的
gsl_interp_steffen

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 20
20 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)