pytorch之学习笔记
Pytorch学习笔记本文主要是参考B站视频小土堆的pytorch基础教程,如想加深理解可以自行前去观看,讲的挺好的,很基础一、环境配置数据包、显卡等环境配置,根据视频提示进行环境测试,经过测试发现本地环境是可用的二、torch学习1、两个工具函数:用于探索Python或pytorch中的工具包dir():能让我们知道工具箱中有什么东西help():告诉我们工具的使用方法2、pycharm 和 j
Pytorch学习笔记
本文主要是参考B站视频小土堆的pytorch基础教程,如想加深理解可以自行前去观看,讲的挺好的,很基础
一、环境配置
数据包、显卡等环境配置,
根据视频提示进行环境测试,
经过测试发现本地环境是可用的
二、torch学习
1、两个工具
用于探索Python或pytorch中的工具包
- dir():能让我们知道工具箱中有什么东西
- help():告诉我们工具的使用方法
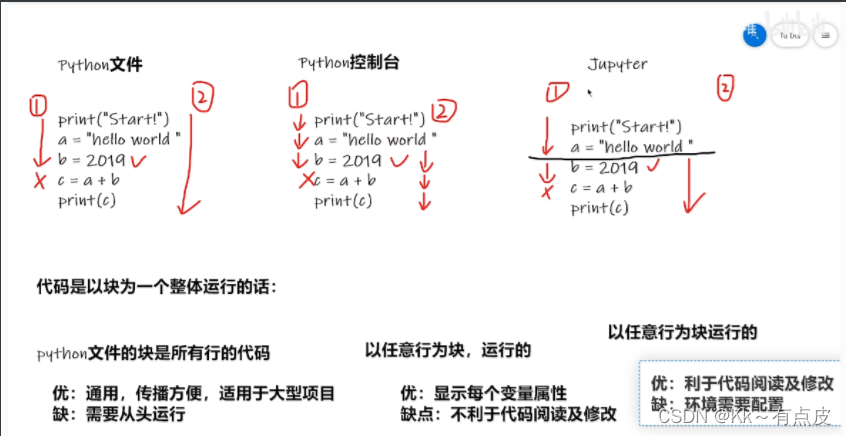
2、pycharm 和 jupyter的区别
3、pytorch如何加载数据
注:类中–init-- (self)初始化函数
#类首先要初始化,即根据这个类创建实例的时候自动调用的函数
#作用:为class提供全局变量,为后面的函数提供他们所需要的 量
、、、
3.1、两个库函数
3.1、主要用到两个库函数:
3.1.1、Dataset():
3.1.2、Dataloader():
- 概念:是一个迭代器,方便我们去多线程地读取数据,并且可以实现batch以及shuffle的读取等
- 用法:
test_loader = DataLoader(dataset=test_data, batch_size=4, shuffle=True, num_workers=0, drop_last=True)- 如上,test_loader 就是我们生成的数据迭代器,
- 即加载test_data数据集,每次打包四个数据,打包成imgs和targets,
- shuffle表示每次迭代完之后,下次迭代是否打乱顺序
- drop_list 表示是否删除非完整页的结尾数据
- 完整参数参考官方文档。
3.1.3、总结:
- Dataset是一个包装类,用来将数据包装为Dataset类,然后传入DataLoader中
- 我们再使用DataLoader这个类来更加快捷的对数据进行操作。
3.2、数据的组织形式
- 如一个文件夹内存放多个同类的图片:文件夹的名称就是其label
- 数据和label存放在不同的文件夹内
4、其他工具
4.1、可视化工具Tensorboard—针对模型训练
因为我们编写出来的TensorFlow或pytorch(1.0之后添加了这个模块)程序,建好一个神经网络,
其实我们也不知道神经网络里头具体细节到底做了什么,要人工调试十分困难(就好比你无法想象出递归的所有步骤一样)。
有了TensorBoard,可以将TensorFlow程序的执行步骤都显示出来,非常直观。并且,我们可以对训练的参数(比如loss值)进行统计,用图的方式来查看变化的趋势。
- Summarywrite类:’ SummaryWriter '类提供了一个高级API来创建一个事件文件,在给定的目录中添加摘要和事件。
-
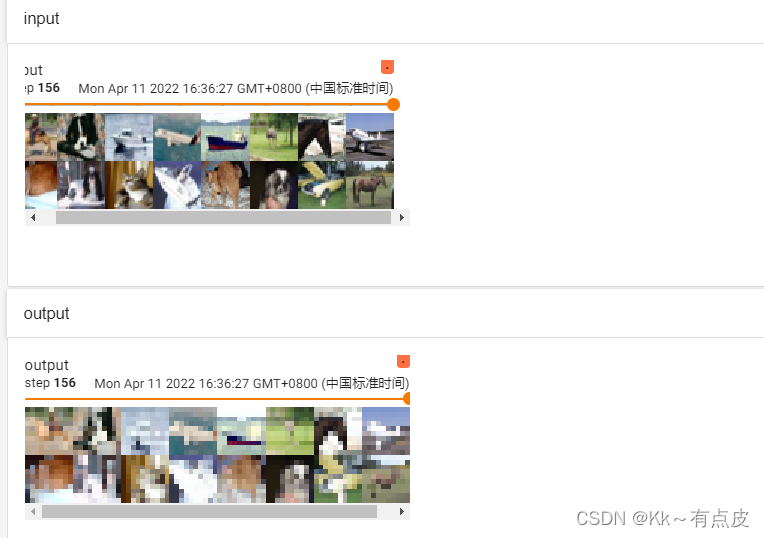
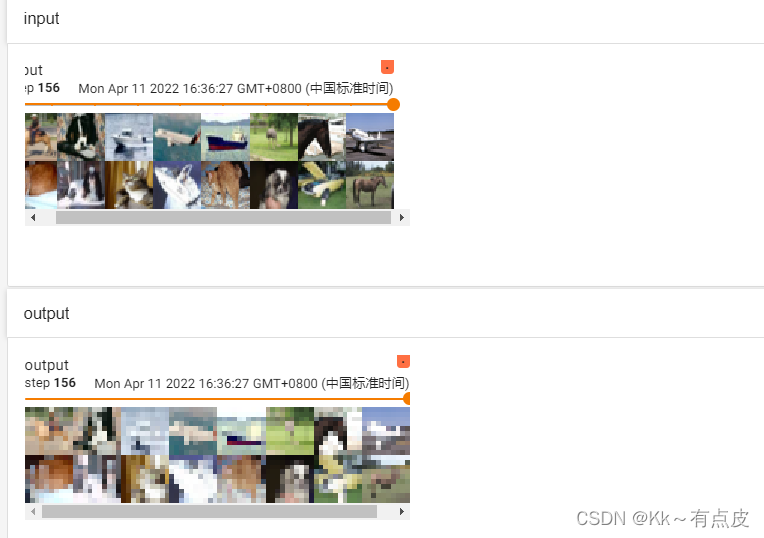
#命令行中显示事件文件的端口地址:tensorboard --logdir = 事件文件所在文件夹名 #修改地址:tensorboard --logdir=logs --port=6007 #某些情况可能会有发生事件冲突,造成图像混乱(如修改变量时没有修改标签):这时可以将事件删除重新运行 - add_image()方法:在事件文件中添加图片(本次加载的图片为PIL类型,不符合类型要求,所以要转换,可用OpenCV或numpy直接转换)
-
4.2、transforms结构及用法
4.2.1、什么是transforms?
- 常用的图像预处理方法 ,一般用于转换图片格式
- 有多个图片处理方法,如:
ToTensor()对象可传入两种图片格式:- PIL:用PIL的Image工具打开
- numpy:用OpenCV打开
4.2.2、transforms该如何使用?
- 首先创建一个具体的工具(如ToTensor工具,相当于创建类对象):tool = transforms.ToTensor()
- 然后给工具传入参数(传入图片):result = tool(input)
- 最后得到tensor类型的图片
4.2.3、为什么我们需要Tensor数据类型?
- tensor类型中的很多属性我们都需要在神经网络中用到,如反向传播、梯度等
- 所以我们必定要用到transforms将数据转换为tensor类型,然后进行训练
4.3、常见的transforms
可直接去查看文档里查看其相关方法的及其用法
注:Python类中 ——call—— 方法的用法:
- 相当于类对象的有参构造
- def --call-- (self, 参数列表)
4.3.1、ToTensor 方法的使用:
- 前面讲过,先把图片打开为PIL类型或者numpy类型的对象
- 然后将对象传入创建好的ToTensor工具,将图片格式转为Tensor类型
4.3.2、Normalize-归一化的使用:
- 公式:
input[channel] = (input[channel] - mean[channel])/std[channel] - 目的:改变图像的像素范围,
- 用法:假设是三通道的图片,且像素范围是(0,1)
trans_norm=transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])
先实例化一个Normalize对象,然后传入两个参数,一个均值,一个标准差(都是三通道的),结果就将图片的像素范围变成(-1,1) - 注:只有tensor类型的图片能使用这个方法,所以将上边ToTensor的图片直接使用即可。
4.3.3、Resize-图片缩放:
- 目的:Resize the input PIL Image to the given size, and return a PIL Image
- 用法:同样可以输入参数列表或一个参数,一个参数的话代表缩放为参数大小的正方形
trans_resize = transforms.Resize((512,700)) #传入一个参数列表,实例化一个resize对象对图片进行缩放
img_resize = trans_resize(img) #传入一个PIL图片 - 最后再将输出的图片转为tensor类型用SummaryWriter进行输出
4.3.4、Compose-组合方法的使用
- 目的:将几个转换组合在一起。此转换不支持torchscript。输入是一个transforms对象的列表
相当于简化操作步骤 - 用法:还是先实例化对象,然后传参
trans_resize_2 = transform.Resize(512)
#传入transforms对象列表进行实例化
trans_Compose = transeform.Compose([trans_resize_2, trans_tensor])
img_resize_2 = trans_compose(img)
4.3.5、RandomCrop–随机裁剪
- 目的:在一个随机的位置裁剪给定的图像。返回的结果也是一个PIL,可以传一个参数或两个通道的列表。
- 用法:与上边的使用类似,详见代码。
4.3.6、小结
- 多关注输入和输出类型
- 不会的多看官方文档
- 关注方法需要什么参数
- 不知道返回值的时候:
- print(type())
- debug
4.4、torchvision中的数据集使用
-
去pytorch官方文档找torchvision的datasets模块,里面有很多开元的数据集,可以在代码里直接使用和下载,方法参考官方文档。
-
下载数据集的时候,download选项可以一直为True,因为已下载的不会重复下载。
-
下载数据集的同时可以转换整个数据集的数据类型:在每个torchvision.datasets下的数据集都会有transforms选项,即transforms转换的实例对象。
代码如下:
dataset_transform = torchvision.transforms.Compose([
torchvision.transforms.ToTensor(),
])train_set = torchvision.datasets.CIFAR10(root="./datasets", train=True, transform=dataset_transform, download=True) #训练集 test_set = torchvision.datasets.CIFAR10(root="./datasets", train=False, transform=dataset_transform,download=True) #测试集
5、搭建神经网络
5.1、神经网络的基本骨架–nn.Module的使用
~注·:Python中类的定义时,类的继承直接在括号里添加
class 类名(继承的类)
-
nn(natural network)下的container是nn的容器,包含了基本骨架
-
其中container中的nn.Module是所有神经网络模块最基本的一个类,为所有神经网络提供基本骨架,
然后再其中进行填充就能形成一个神经网络 -
forward是一个前向的神经网络处理器(一般会对其进行重写)
-
如果神经网络要重写初始方法,则必须要调用父类的初始化函数
总结:
一个nn.module可以视为一个块。所有的module包含两个主要函数:
init函数:在里边定义一些需要的类或参数。包括网络层
forward函数:做最终的计算和输出,其形参就是模型(块)的输入。
5.2、卷积操作–torch.nn.function
-
卷积分为不同的层,如con1、con2等
-
以二层卷积为例,具体的参数可查看官方文档
-
卷积操作主要就是用卷积核(weight)与原始数据进行计算,再加上其他的操作,最后得到一个新的输出
-
代码示例:
output3 = F.conv2d(input, kernel, stride=1, padding=1)
print(output3)- input3 就是 卷积神经网络模型计算后的 输出,
- input是输入的数据,在此为一个二维数组,代表一张图片
- kernel表示卷积核,同input形状,也是一个二维数组,并且两者的形状都要有四个指标,否则要进行reshape
- stride表示步长
- padding表示周围填充几层,填充的默认值是0
5.3、神经网络–卷积层(torch.nn.conv)
- 其实就是对nn.function的进一步封装
- 如nn.Conv2(),最常用的是这五个参数:in_channels、 out_channels、kernel_size、stride=、 padding
- 实例:
#在初始化方法中定义进行卷积操作
self.conv1 = Conv2d(in_channels=3, out_channels=6, kernel_size=3, stride=1, padding=0)- in_channels=3:三通道输入(彩色图片)
- out_channels=6:输出是六通道(6层),即生成留个卷积核
- kernel_size=3:每个卷积核的维度是3*3
- stride=1:步长为1
- padding=0:
5.4池化层–最大池化(torch.nn.maxpool)
- 最大池化层(常用的是maxpool2d)的作用:
- 一是对卷积层所提取的信息做更一步降维,减少计算量
- 二是加强图像特征的不变性,使之增加图像的偏移、旋转等方面的鲁棒性
- 类似于观看视频时不同的清晰度,实际效果就像给图片打马赛克
- maxpool2d:注意输入的图像形状为4维,即形状不对时要先reshape
- 实例及结果:
self.maxpool1 = MaxPool2d(kernel_size=3, ceil_mode=False)
5.5、填充层(torch.nn.padding)
一般在其它层里就可以实现,所以就不过多介绍padding层。
5.6非线性激活(Non-linear Activations)
非线性变换的主要目的就是给网中加入一些非线性特征,
非线性越多才能训练出符合各种特征的模型。常见的非线性激活:
- ReLU:主要是对小于0的进行截断(将小于0的变为0),图像变换效果不明显
- 主要参数是inplace:
inplace为真时,将处理后的结果赋值给原来的参数;为假时,原值不会改变。
- 主要参数是inplace:
- SIGMOID: 归一化处理
- 效果没有ReLU好,但对于多远分类问题,必须采用sigmoid
- 处理后结果

5.7、线性层(torch.nn.linea)
-
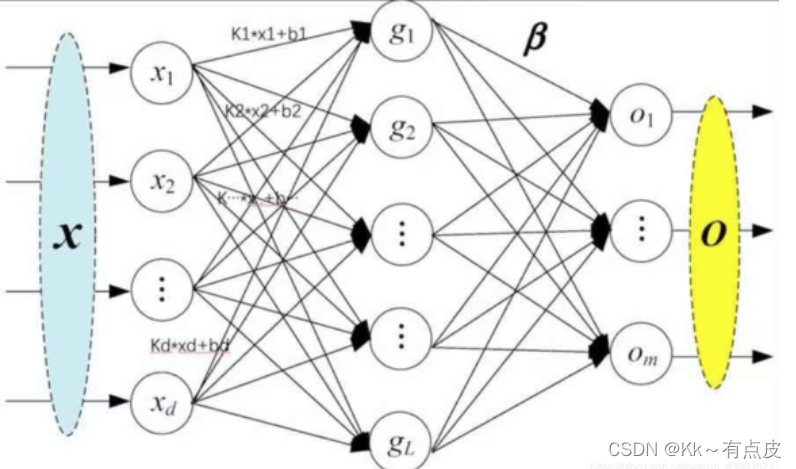
线性层又叫全连接层,其中每个神经元与上一层所有神经元相连,一个简单的线性层如下图所示:
-
线性函数为:torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None),其中重要的3个参数in_features、out_features、bias说明如下:
- in_features:每个输入(x)样本的特征的大小
- out_features:每个输出(y)样本的特征的大小
- bias:如果设置为False,则图层不会学习附加偏差。默认值是True,表示增加学习偏置。
在上图中,in_features=d,out_features=L。
-
作用可以是缩小一维的数据长度
5.8、其它层
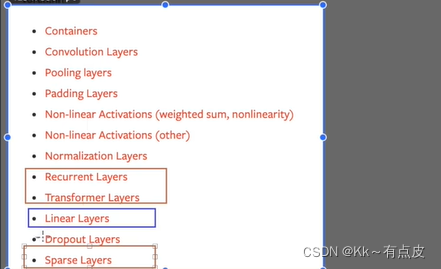
除了前面学的和图中标出来的,其它层用到的一般较少
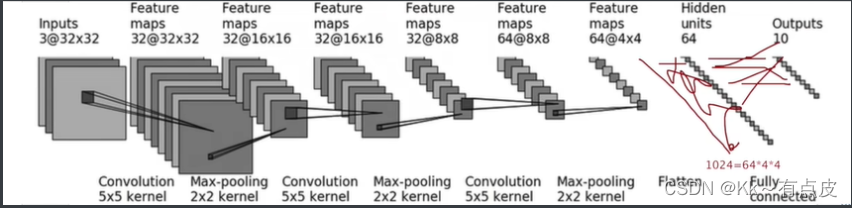
5.9、SEQUENTIAL的使用(torch.nn.Sequential)
- 主要是方便代码的编写,使代码更加简洁
- 根据下图搭建神经网络:判断一个图的类别(最后输出为十个类别,最后进行判断)
- 根据公式计算其他参数的值
-
实例:注意,每个层后要加逗号,相当于传递参数
-
使用tensorboard中的add_graph 查看神经网络的流程图
5.10、损失函数与反向传播
- 注意:inputs和targets的格式一定要符合要求,一般要对其进行reshape和dtype
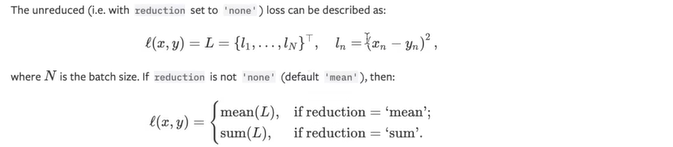
损失函数(Loss):有多种计算方式
-
计算实际输出和目标之间的差距
-
为我们更新输出 提供一定的依据
- 更新输出:
- 反向传播(backward)–>
- 计算出梯度(grade)–>
- 根据梯度和学习率来更新参数–>
- 减小loss
- 更新输出:
-
损失函数举例:
-
均方方差损失(MSELoss()):
-
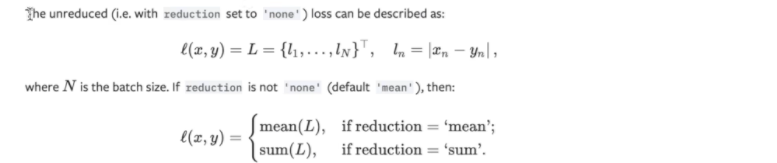
L1Loss(): 如图所示,计算的结果
-
交叉熵损失(CrossEntropyLoss()):x是网络输出的数组,class是类别的下标
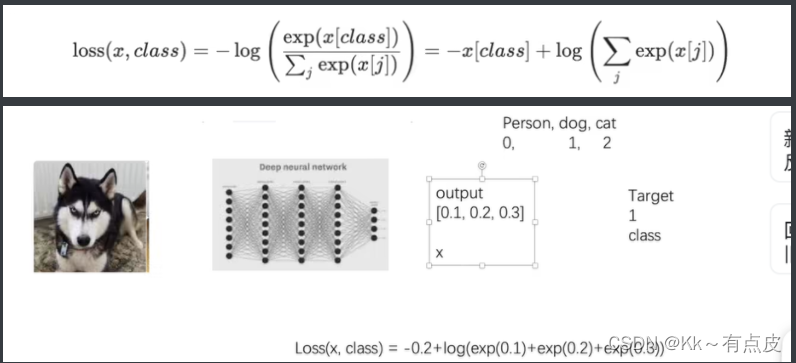
-
反向传播:
- 反向传播是一个更新参数的过程。
- (1)前向传播:将训练集数据输入到ANN的输入层,经过隐藏层,最后到达输出层并输出结果。【输入层—隐藏层–输出层】
- (2)反向传播:由于ANN的输入结果与输出结果有误差,则计算估计值与实际值之间的误差,并将该误差从输出层向隐藏层反向传播,直至传播到输入层。【输出层–隐藏层–输入层】
- (3)权重更新:在反向传播的过程中,根据误差调整各种参数的值;不断迭代上述过程,直至收敛。
- 举一个例子来说明我理解的反向传播的思想是:
(1)前向传播:三个人在玩你画我猜的游戏,然后第一个人给第二个人描述,再将信息传递给第三个人,由第三个人说出画的到底是啥。
(2)反向传播:第三个人得知自己说的和真实答案之间的误差后,发现他们在传递时的问题差在哪里,向前面一个人说下次描述的时候怎样可以更加准确的传递信息。就这样一直向前一个人告知。
(3)三个人之间的的默契一直在磨合,然后描述的更加准确。
5.11、优化器
1、过程描述
- 继上节的计算损失函数和反向传播,
- 之后便是根据损失值,利用优化器进行梯度更新,然后不断降低loss的过程
- 一般要对数据集扫描多遍,进行参数的多次更新,才能得到一个较好的效果。
-
注意,每次更新后要将梯度置0,然后重新计算梯度注意,每次更新后要将梯度置0,然后重新计算梯度
-
2、常用优化器:
- 优化器的种类比较多,常用的就是随机梯度下降(SGD) 等
- 不同的优化器的参数列表一般不同,但都会有 params(模型的参数列表)和lr(学习率)参数,
- 一般设置这两个参数,其他的可用默认值
3、代码及结果
-
部分代码:
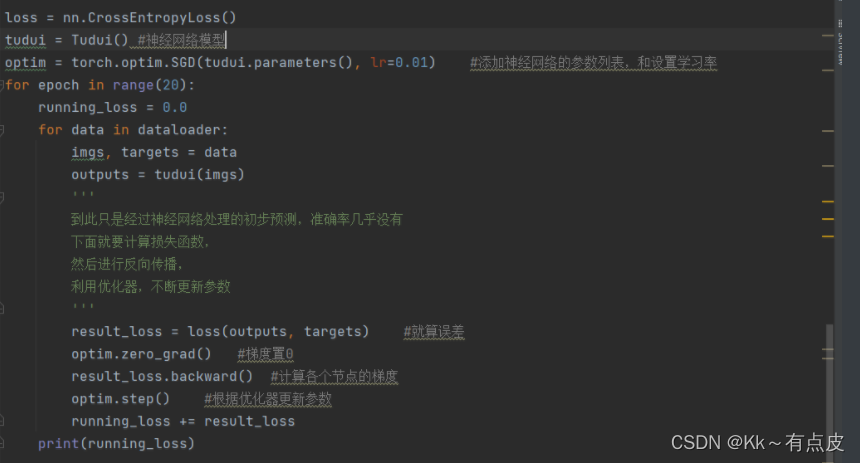
-
在本机上的运行结果:
速度特别慢,跑20遍就用了十分钟左右
而且损失还会上升,什么情况。。。
三、模型训练
1、现有网络模型的使用及修改
1.1、VGG16模型:
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
- 上面两行代码的区别:
- 第一个是模型初始化的参数,第二个是经过训练的参数
- 第一个相当于一个单纯的 神经网络结构,第二个是经过训练的神经网络结构(需要下载参数)
- 因为VGG16最终的输出是1000个分类,加入我们需要10个分类的话,就需要改动:
- 修改的方法有两种:
-
添加一层(线性层),改变最后的输出类别数
-
改变原有模型的输出
以vgg_false模型为例,其原始结构如下:所以要改变下标为6的那一层:
-
1.2、其他模型
自行查阅官方文档
2、网络模型的保存与读取
2.1、概述
- 因为有些较大的网络模型(无论是加载初始参数还是预训练过的参数)都需要花费一定的时间,特别是预训练的模型,要花很长时间下载参数,
- 所以我们可以将反复用到的模型保存下来,到时候直接读取使用即可
2.2、保存和读取方法
一般训练好的模型都需要进行保存,否则每次使用都要重新训练。
-
方式一
-
保存:保存模型结构及其参数。torch.save(model, path)
-
读取:获取一个完整的模型。torch.load(“模型名”)
-
-
方式二
-
保存:只保存模型的参数。torch.save(model.state_dict(), path)
-
读取:只能加载出模型的参数,要先新建网络模型,然后再装载参数(一般用于加载预训练的参数)。
-
-
陷阱:自定义的网络如果保存后再加载的话,需要再重新定义一遍网络结构。
3、完整的模型训练套路
- 准备数据集
- 创建迭代器
- 创建网络模型
- 创建损失函数
- 添加优化器
- 设置一些训练的参数(训练次数、训练轮数等),
- 开始模型训练
- 优化器不断优化模型
- 开始测试
- 打印测试结果(准确度)
具体代码请参考视频相关视频

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 76
76 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)