aubo_i5机械臂-手眼标定-eyes on hand、识别跟踪标定码
aubo_i5机械臂-手眼标定-eyes on hand、控制机械臂末端识别跟踪标定码
根据师兄的博客 aubo_i5机械臂无序抓取实践二:eye_in_hand 手在眼上-手眼标定_我不不不不喝可乐的博客-CSDN博客_aubo手眼标定
补充手眼标定后续的tf发布,并基于此控制aubo机械臂末端跟踪标定码
文章目录
1.参考连接
-
IFL-CAMP/easy_handeye: Automated, hardware-independent Hand-Eye Calibration (github.com)
-
aubo_i5机械臂无序抓取实践二:eye_in_hand 手在眼上-手眼标定_我不不不不喝可乐的博客-CSDN博客_aubo手眼标定
Moveit官方文档:
ArUco markers generator:
2.安装功能包
在aubo_ws下已经按照github上的要求安装好了相应的功能包
3.创建eye_on_hand_calibration.launch文件
参考aubo_ws/src/easy_handeye/docs/example_launch/ur5e_realsense_calibration.launch
创建eye_on_hand_calibration.launch,
文件位于aubo_ws/src/easy_handeye/easy_handeye/launch/
eye_on_hand_calibration.launch:
<launch>
<arg name="namespace_prefix" default="aubo_i5_calibration" />
<arg name="robot_ip" doc="The IP address of the aubo_i5 robot" />
<arg name="marker_size" doc="Size of the ArUco marker used, in meters" />
<arg name="marker_id" doc="The ID of the ArUco marker used" />
<!-- 1 start realsense-->
<!-- include file="$(find realsense2_camera)/launch/rs_camera.launch" /-->
<!-- 2 start ArUco -->
<node name="aruco_tracker" pkg="aruco_ros" type="single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="true"/>
<param name="marker_size" value="0.1"/>
<param name="marker_id" value="25"/>
<param name="reference_frame" value="camera_color_optical_frame"/>
<param name="camera_frame" value="camera_color_optical_frame"/>
<param name="marker_frame" value="camera_marker"/>
</node>
<!-- 3 start the robot -->
<include file="$(find aubo_i5_moveit_config)/launch/moveit_planning_execution.launch">
<arg name="sim" value="true" />
<arg name="robot_ip" value="192.168.99.254" />
</include>
<!-- 4 start easy_handeye -->
<include file="$(find easy_handeye)/launch/calibrate.launch" >
<arg name="namespace_prefix" value="$(arg namespace_prefix)" />
<arg name="eye_on_hand" value="true" />
<arg name="tracking_base_frame" value="camera_link" />
<arg name="tracking_marker_frame" value="camera_marker" />
<arg name="robot_base_frame" value="base_link" />
<arg name="robot_effector_frame" value="wrist3_Link" />
<arg name="freehand_robot_movement" value="false" />
<arg name="robot_velocity_scaling" value="0.5" />
<arg name="robot_acceleration_scaling" value="0.2" />
</include>
</launch>
注:
namespace_prefix自定义为 “aubo_i5_calibration” ,
后续可以用publish.launch发布标定后的TF,其namespace_prefix应该与自定义的一致,这样才能找到标定好的 YAML 文件
- marker_id 应与实际使用的图片ID一致
- 在start ArUco中 camera_frame 应设置为
camera_color_optical_frame
4.标定流程
- 运行launch文件,会打开相应的RVIZ和rqt界面
roslaunch easy_handeye eye_on_hand_calibration.launch
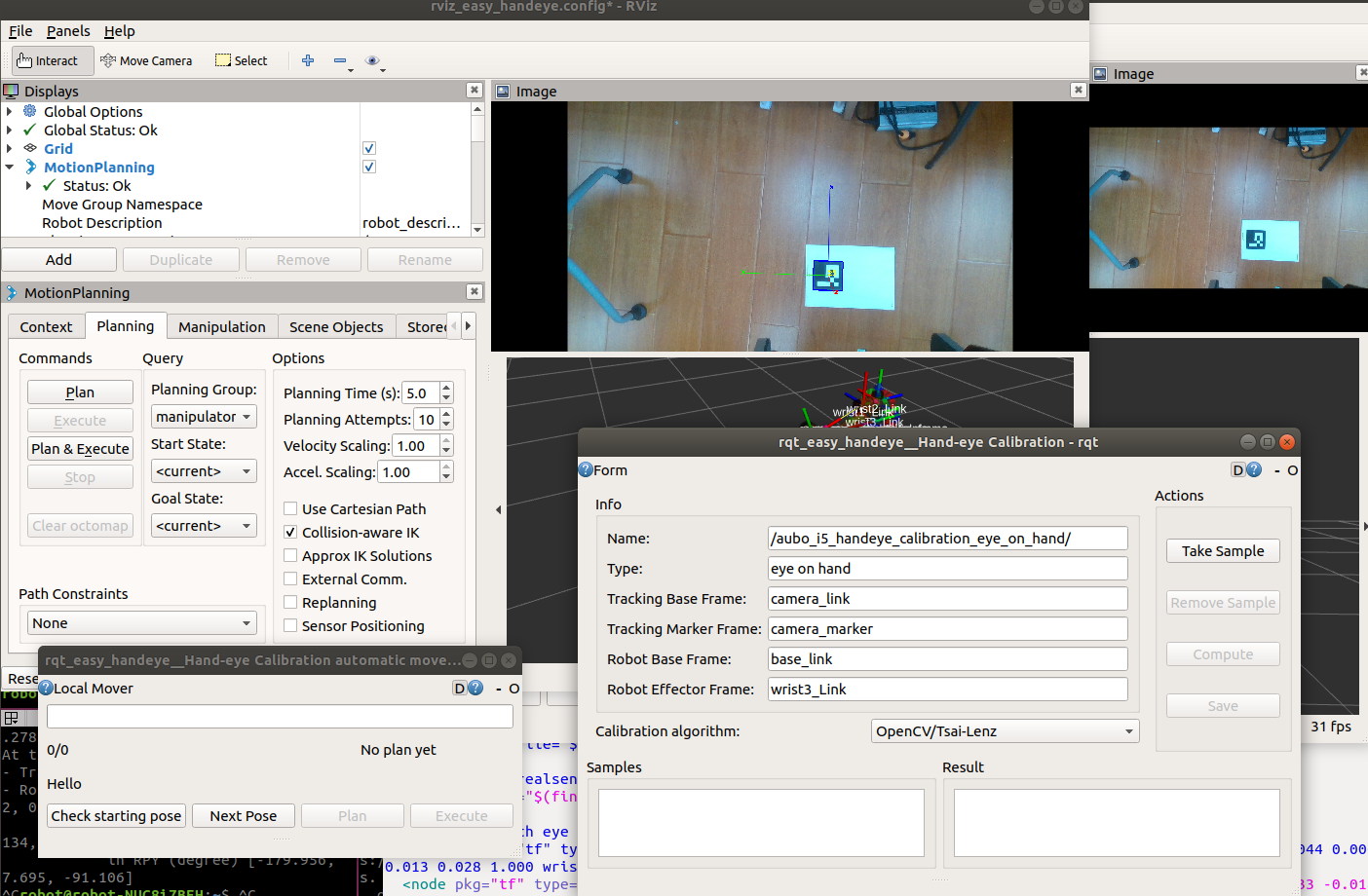
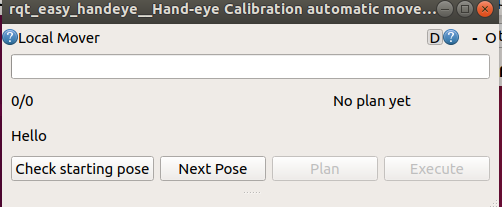
机器人自主移动界面:
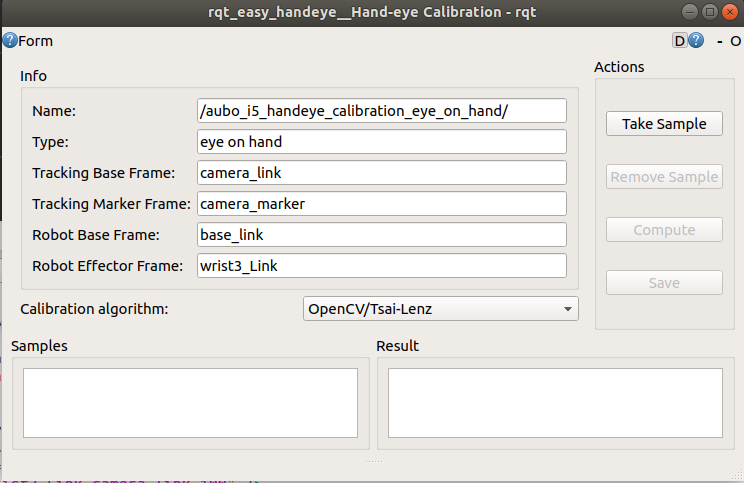
标定界面:
- 标定操作
(1) 手动调节机械臂,使 aruco 二维码移动至相机视野中心处附近。在机器人自主移动界面中,点击 check starting pose,若检查成功,界面会出现: 0/17,ready to start。
(2)机器人自主移动界面中依次点击 Next Pose,Plan,Execute,机械臂会移动至新的位置,若二维码在相机视野范围内,且能检测成功,则进行下一步。
(3)标定界面中点击 Take Sample,若 Samples 对话框中出现有效信息,说明第一个点采样成功。
(4)重复执行步骤(2)和步骤(3),直至 17 个点全部采样完毕。
(5)标定界面中点击 Compute,则 Result 对话框中会出现结果。
(6)标定界面中 Save,会将结果保存为一个 YAML 文件,路径为 ~/.ros/easy_handeye
aubo_i5_calibration_eye_on_hand.yaml
parameters:
eye_on_hand: true
freehand_robot_movement: false
move_group: manipulator_i5
move_group_namespace: /
namespace: /aubo_i5_calibration_eye_on_hand/
robot_base_frame: base_link
robot_effector_frame: wrist3_Link
tracking_base_frame: camera_link
tracking_marker_frame: camera_marker
transformation:
qw: 0.5044090478676875
qx: -0.5437136044950396
qy: -0.4612761515238514
qz: -0.48700240322976784
x: -0.0024504907487361725
y: 0.03589105151444005
z: 0.024799751488110557
5. 发布标定后的TF
easy_handeye 功能包提供了 publish.launch 文件,可以将标定好的 TF 发布出。
publish.launch
<?xml version="1.0"?>
<launch>
<arg name="eye_on_hand" doc="eye-on-hand instead of eye-on-base" default="true"/>
<arg name="namespace_prefix" default="easy_handeye" />
<arg if="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_hand" />
<arg unless="$(arg eye_on_hand)" name="namespace" value="$(arg namespace_prefix)_eye_on_base" />
<!--it is possible to override the link names saved in the yaml file in case of name clashes, for example-->
<arg if="$(arg eye_on_hand)" name="robot_effector_frame" default="" />
<arg unless="$(arg eye_on_hand)" name="robot_base_frame" default="" />
<arg name="tracking_base_frame" default="" />
<arg name="inverse" default="false" />
<arg name="calibration_file" default="" />
<!--publish hand-eye calibration-->
<group ns="$(arg namespace)">
<param name="eye_on_hand" value="$(arg eye_on_hand)" />
<param unless="$(arg eye_on_hand)" name="robot_base_frame" value="$(arg robot_base_frame)" />
<param if="$(arg eye_on_hand)" name="robot_effector_frame" value="$(arg robot_effector_frame)" />
<param name="tracking_base_frame" value="$(arg tracking_base_frame)" />
<param name="inverse" value="$(arg inverse)" />
<param name="calibration_file" value="$(arg calibration_file)" />
<node name="$(anon handeye_publisher)" pkg="easy_handeye" type="publish.py" output="screen"/>
</group>
</launch>
注意修改参数 namespace_prefix 与标定的 launch 文件中的保持一致,这样才能找到标定好的 YAML 文件。
- ----方法1----
roslaunch easy_handeye publish.launch namespace_prefix:=aubo_i5_calibration
查看 TF(基坐标系到相机坐标系)
rosrun tf tf_echo /base_link /camera_link
在实际应用中可在机器人launch 文件中这样发布标定信息
<include file="$(find easy_handeye)/launch/publish.launch" >
<arg name="namespace_prefix" default="aubo_i5_calibration" />
<arg name="eye_on_hand" value="true" />
</include>
-
----方法2----
添加static_transform_publisher节点,实时(100hz)发布位置转换关系
<node pkg="tf" type="static_transform_publisher" name="static_transform_publisher" args="x y z qx qy qz qw <frame_id> <child_frame_id> 100" />
——方法1具体配置——
在 /home/robot/amr_ws/src/ir100_aubo_moveit_config/launch 下的moveit_planning_execution.launch
或 /home/robot/aubo_ws/src/iaubo_i5_moveit_config/launch 下的moveit_planning_execution.launch
添加如下内容
<include file="$(find easy_handeye)/launch/publish.launch" >
<arg name="namespace_prefix" default="aubo_i5_calibration" />
<arg name="eye_on_hand" value="true" />
</include>
——方法2具体配置——
在上述同样的moveit_planning_execution.launch
添加如下节点,发布标定后的结果
根据.ros/下最新的标定结果,自定义修改相应的参数值

总结:
后续重新标定时,方法2需要根据最新的.yaml文件,手动输入更改对应的参数值
方法1只需保证namespace_prefix的参数值与第3步的eye_on_hand_calibration.launch中的namespace_prefix一样即可
6.获取标定码相对ref_frame的空间位姿
参考 /home/robot/aubo_ws/src/aruco_ros/aruco_ros/launch 的 single.launch
新建single_marker_frame_to_ref_frame.launch
<launch>
<arg name="markerId" default="25"/>
<arg name="markerSize" default="0.1"/> <!-- in m -->
<arg name="eye" default="left"/>
<arg name="marker_frame" default="aruco_marker_frame"/>
<!-- leave empty and the pose will be published wrt param parent_name -->
<!--arg name="ref_frame" default="camera_color_frame"/-->
<!--arg name="ref_frame" default="wrist3_Link"/-->
<arg name="ref_frame" default="camera_link"/>
<arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX -->
<node pkg="aruco_ros" type="single" name="aruco_single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="$(arg markerSize)"/>
<param name="marker_id" value="$(arg markerId)"/>
<param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered -->
<param name="camera_frame" value="camera_color_optical_frame"/>
<param name="marker_frame" value="$(arg marker_frame)" />
<param name="corner_refinement" value="$(arg corner_refinement)" />
</node>
</launch>
测试:
- 单独打开realsense
roslaunch realsense2_camera rs_camera.launch
- 启动single_marker_frame_to_ref_frame.launch
roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=camera_color_optical_frame
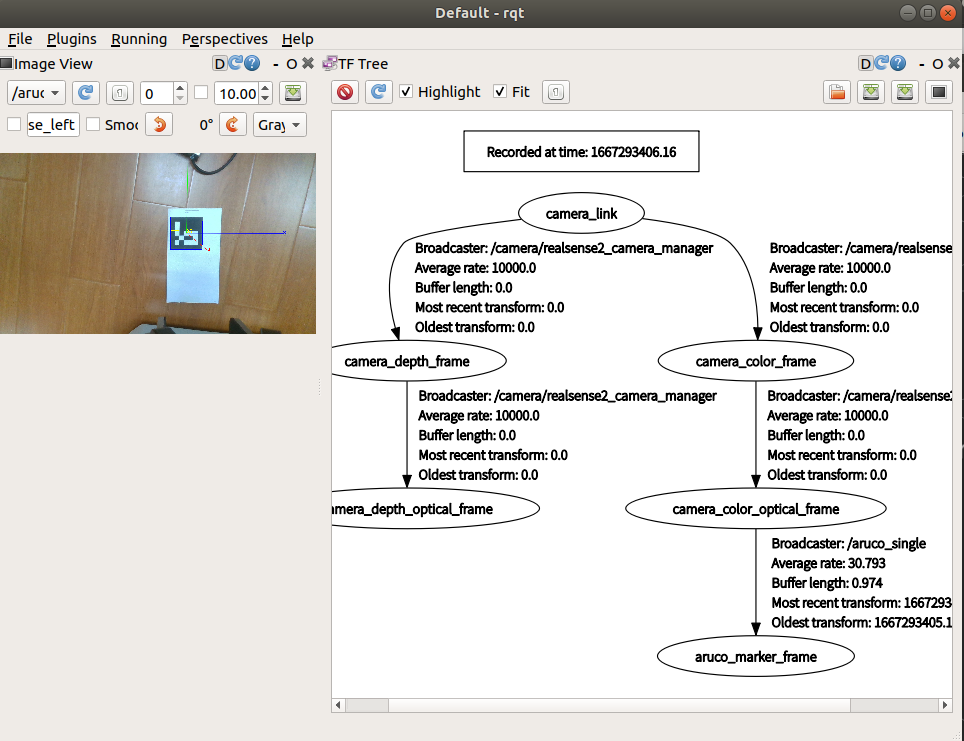
- 打开rqt,选择/aruco_single/result
rqt
- 在终端输出相对空间坐标
rostopic echo /aruco_single/pose
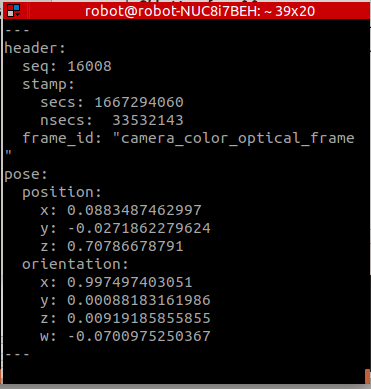
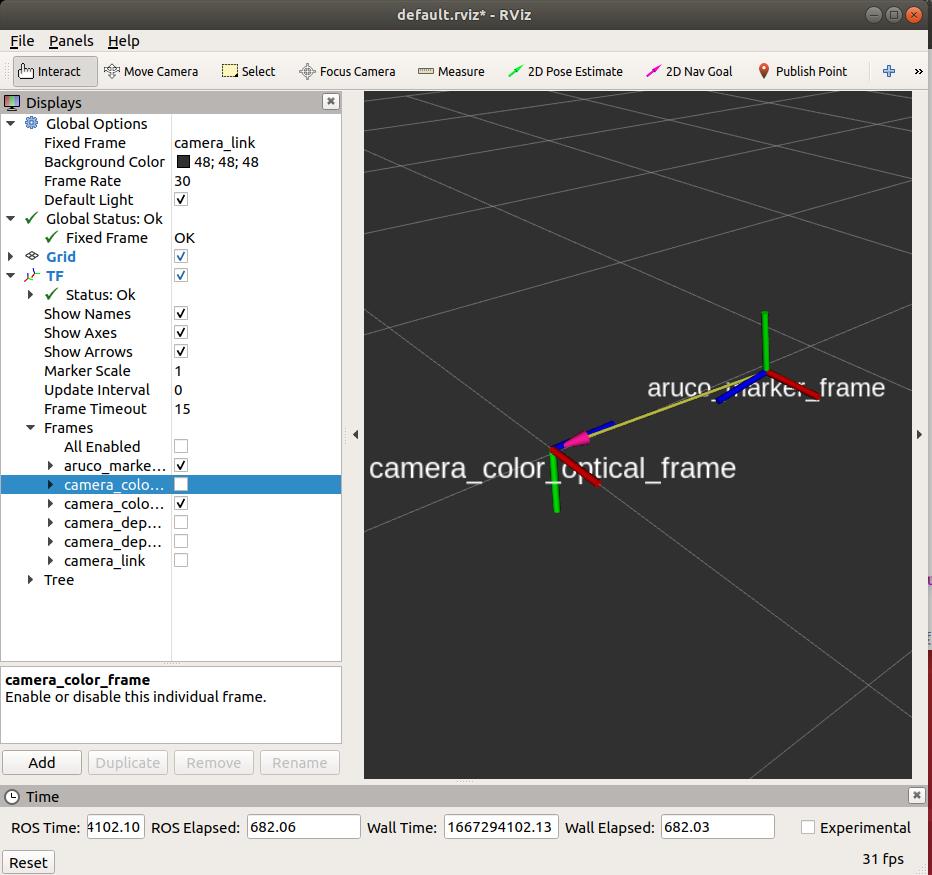
如rviz所示
X轴为红色,Y轴为绿色,Z轴为蓝色
aruco_marker_frame相对 camera_color_optical_frame 的位姿与终端输出基本一致
7. 获取标定码相对机械臂基座的空间位姿
单独使用机械臂
- 启动机械臂
roslaunch aubo_i5_moveit_config moveit_planning_execution.launch robot_ip:=192.168.99.254
- 获取标定码相对机械臂基座的空间位姿
roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=base_link
- 在终端输出相对空间坐标
rostopic echo /aruco_single/pose
机械臂与小车联合使用
-
- 启动小车和机械臂、moveit
roslaunch ir100_driver ir100_aubo.launch
-
- 获取标定码相对此时机械臂基座的空间坐标,此时机械臂的基座为base_link1,更改ref_frame的参数即可坐标
roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=base_link1
- 在终端输出相对空间坐标
rostopic echo /aruco_single/pose
8. 控制机械臂末端跟踪标定码-python脚本
可以建立一个节点,订阅话题/aruco_single/pose,将获取到的标定码相对于机械臂基座的相对位姿发送给Moveit,
从而控制机械臂末端移动到标定码的位置
代码使用的是Moveit的python接口,参考官方文档
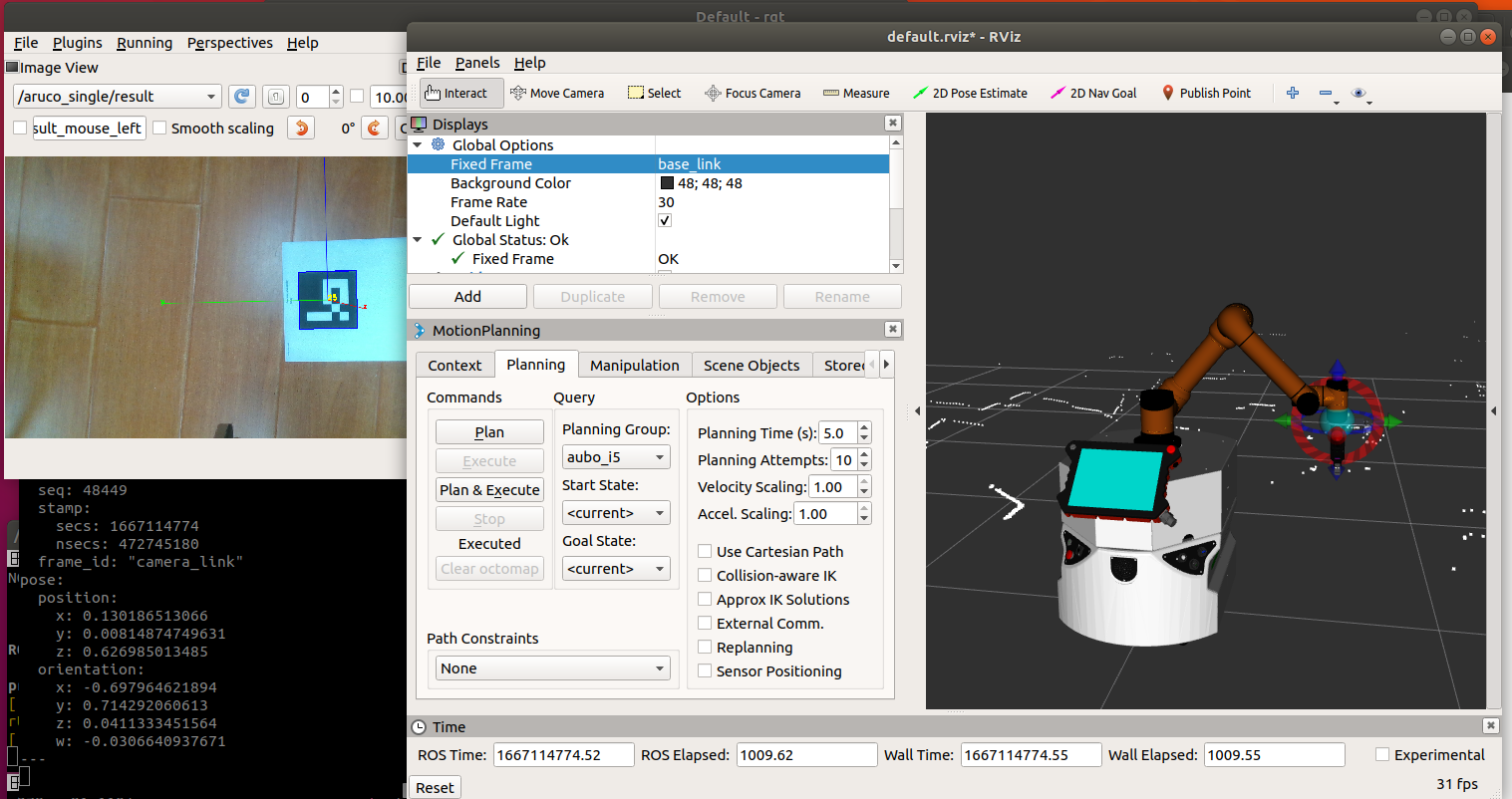
注意:通过rviz里显示,机械臂的末端坐标系wrist3_Link与标定码的坐标系aruco_marker_frame姿态不一致,
为了使机械臂的末端始终是朝向标定码的,根据图中的相对关系,
需将aruco_marker_frame坐标系绕自身的y轴旋转180°

aubo_tracktomarker.py
#!/usr/bin/python
# -*- coding: utf-8 -*-
import rospy, sys ,tf
import moveit_commander
import moveit_msgs.msg
import tf.transformations
from tf.transformations import quaternion_from_euler
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose, PoseStamped
from copy import deepcopy
from std_msgs.msg import String
def track(msg):
# We can get the name of the reference frame for this robot:
planning_frame = arm.get_planning_frame()
print("============ Planning frame: %s" % planning_frame)
# We can also print the name of the end-effector link for this group:
eef_link = arm.get_end_effector_link()
print("============ End effector link: %s" % eef_link)
# Sometimes for debugging it is useful to print the entire state of the
# robot:
print("============ Printing robot state")
print(robot.get_current_state())
print("")
end_effector_link = "wrist3_Link"
pose_goal = Pose()
#基于标定码坐标系自定义设置偏移量
x_offset = -0.15
y_offset = -0.15
z_offset = 0.30
v_offset = ( x_offset,
y_offset,
z_offset)
v = np.asarray(v_offset)
t_m = tftf.translation_matrix(v)
print("---偏移的matrix---")
print (t_m)
marker_m = tftf.quaternion_matrix([msg.pose.orientation.x, msg.pose.orientation.y, msg.pose.orientation.z, msg.pose.orientation.w])
marker_m[0,3] = msg.pose.position.x
marker_m[1,3] = msg.pose.position.y
marker_m[2,3] = msg.pose.position.z
print("---标定码的natrix---")
print(marker_m)
#将平移矩阵右乘标定码矩阵,相当于标定码基于自身坐标系平移
r_dot=np.dot(marker_m,t_m)
print("---偏移后标定码的matrix--")
print(r_dot)
pose_goal.position.x = r_dot[0,3]
pose_goal.position.y = r_dot[1,3]
pose_goal.position.z = r_dot[2,3]
r_q = tftf.quaternion_from_matrix(r_dot)
print("---标定码的quaternion--")
print (r_q)
#右乘四元数[0,1,0,0],绕自身的y轴旋转180°
qf=tf.transformations.quaternion_multiply([r_q[0],
r_q[1],
r_q[2],
r_q[3],
[0,1,0,0])
print("-标定码绕自身y轴旋转180度后的quaternion--")
print(qf)
pose_goal.orientation.x = qf[0]
pose_goal.orientation.y = qf[1]
pose_goal.orientation.z = qf[2]
pose_goal.orientation.w = qf[3]
arm.set_pose_target(pose_goal,end_effector_link)
arm.go()
# It is always good to clear your targets after planning with poses.
# Note: there is no equivalent function for clear_joint_value_targets().
arm.clear_pose_targets()
rospy.sleep(2)
if __name__ == '__main__':
try:
rospy.init_node('track_marker',anonymous = True)
#初始化moveit_group的API
moveit_commander.roscpp_initialize(sys.argv)
#初始化需要使用move group控制的机械臂的arm group
#arm = MoveGroupCommander('aubo_i5') #小车与机械臂的group
arm = MoveGroupCommander('manipulator_i5')
#Instantiate a RobotCommander object.
#Provides information such as the robot's
#kinematic model and the robot's current joint states
robot = moveit_commander.RobotCommander()
#当运动规划失败后,允许重新规划
arm.allow_replanning(True)
#设置目标位置所使用的参考坐标系
#reference_frame = 'base_link1'
reference_frame = 'base_link'
arm.set_pose_reference_frame(reference_frame)
arm.set_planning_time(5)
#设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.001)
#设置允许的最大速度和加速度
arm.set_max_acceleration_scaling_factor(1)
arm.set_max_velocity_scaling_factor(1)
track_sub = rospy.Subscriber('/aruco_single/pose',PoseStamped,track,queue_size=1)
except rospy.ROSInterruptException:
pass
总结
- 在上述的步骤4,5中:
通过 roslaunch easy_handeye eye_on_hand_calibration.launch的标定流程,
在路径为 ~/.ros/easy_handeye下生成了.yaml文件,
并根据该文件在 /home/robot/amr_ws/src/ir100_aubo_moveit_config/launch 下的moveit_execution.launch
添加如下节点,发布标定后的结果,或者使用publish.launch,从而覆盖urdf模型中camera_link相对于wrist_Link3的tf变换
- 在步骤6、7中:
通过roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=....
和rostopic echo /aruco_single/pose
可以在终端显示二维码相对 ref_frame 的空间坐标
- 步骤8中:
利用节点订阅 /aruco_single/pose话题,结合 Moveit,控制机械臂末端到达标定码位置
相关命令汇总
重新标定
默认的 namespace_prefix 为aubo_i5_calibration
roslaunch easy_handeye eye_on_hand_calibration.launch
启动机械臂
##单独的机械臂模型
roslaunch aubo_i5_moveit_config moveit_planning_execution.launch robot_ip:=192.168.99.254
##小车与机械臂模型
roslaunch ir100_driver ir100_aubo.launch
获取标定码相对机械臂基座的位姿
##单独的机械臂模型
roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=base_link
##小车与机械臂模型
roslaunch aruco_ros single_marker_frame_to_ref_frame.launch ref_frame:=base_link1
订阅/aruco_single/pose话题跟踪标定码
cd /home/robot/program/grasp
./aubo_tracktomarker.py
实际演示

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)