G120变频器抱闸逻辑在提升机上应用
一、前言:对于提升机、起重机、堆垛机、升降机等提升机构,负载为位能性负载,在设备启动和停止阶段,由于重物作用,可能会出现“溜车”现象、控制变频器与电机抱闸时许可以解决此问题使用具有矢量控制功能的变频器二、参数设置抱闸控制时序:启动:1、变频器接收到启动命令时-----输出电流对电机进行励磁,经过P346电机励磁时间(==丹佛斯 设置启动电流延时0.5S)------达到一定的转矩2、变频器输出开抱
一、前言:
对于提升机、起重机、堆垛机、升降机等提升机构,负载为位能性负载,在设备启动和停止阶段,由于重物作用,可能会出现“溜车”现象、控制变频器与电机抱闸时许可以解决此问题
使用具有矢量控制功能的变频器
二、参数设置
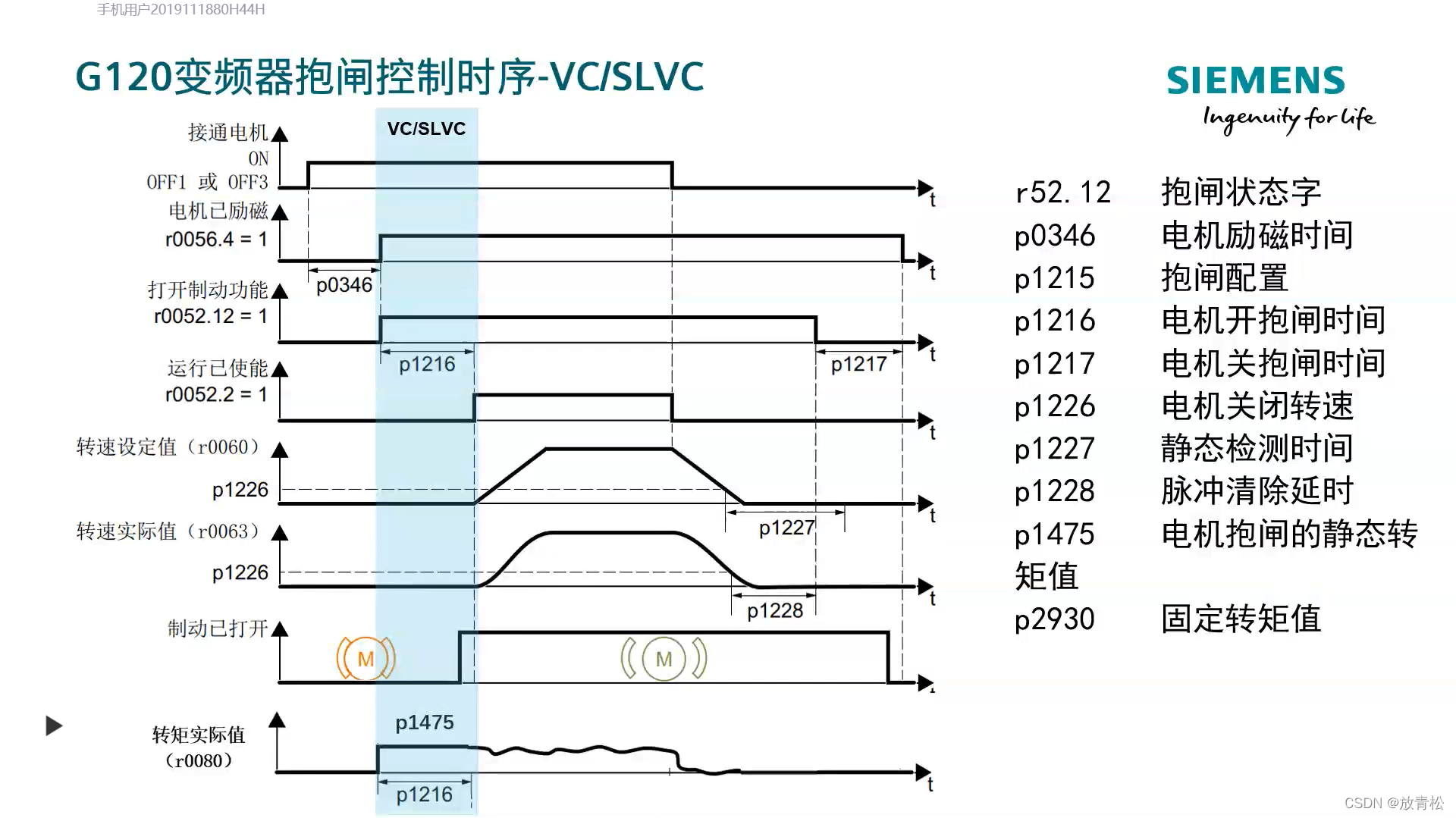
抱闸控制时序:
启动:
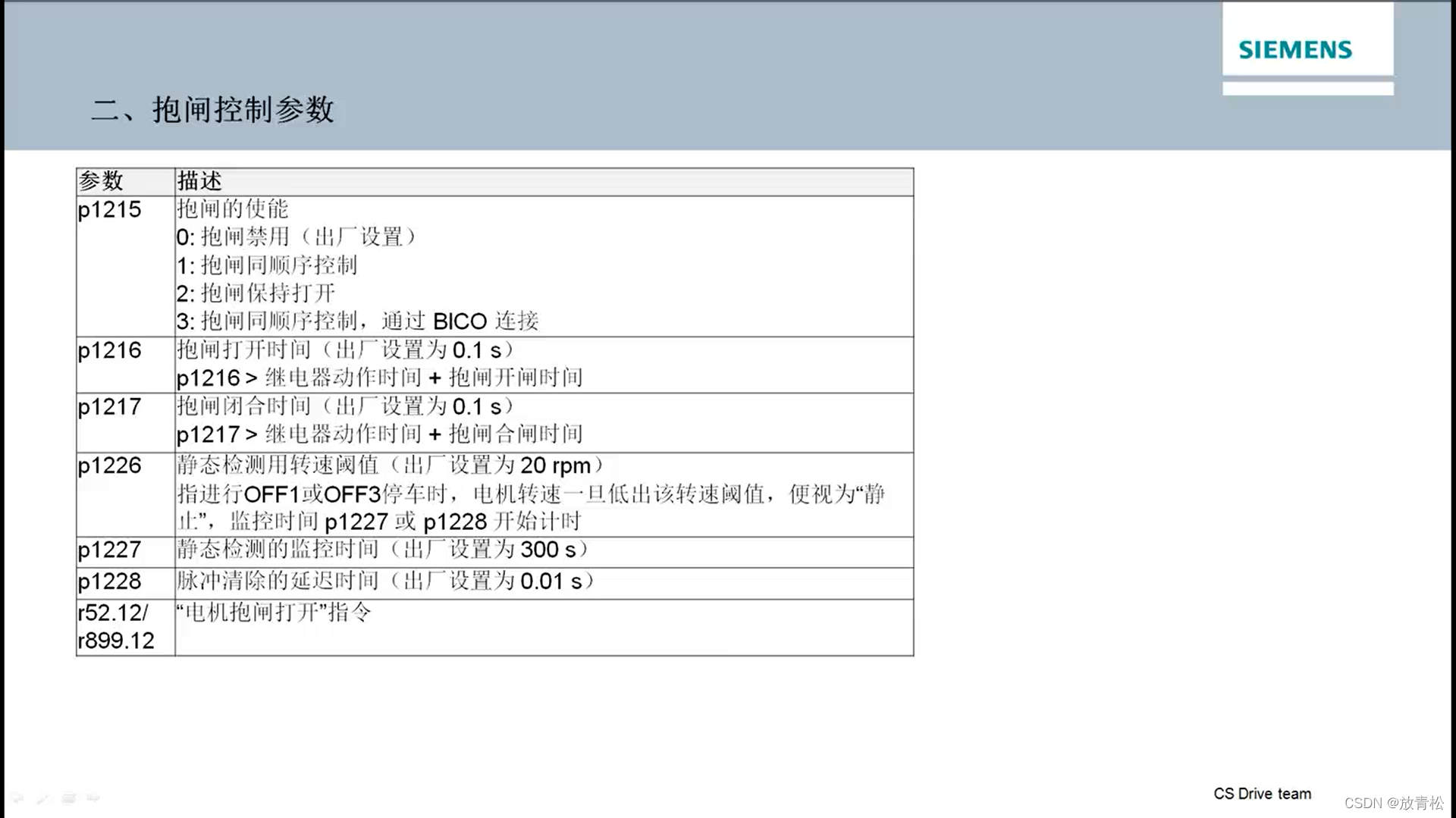
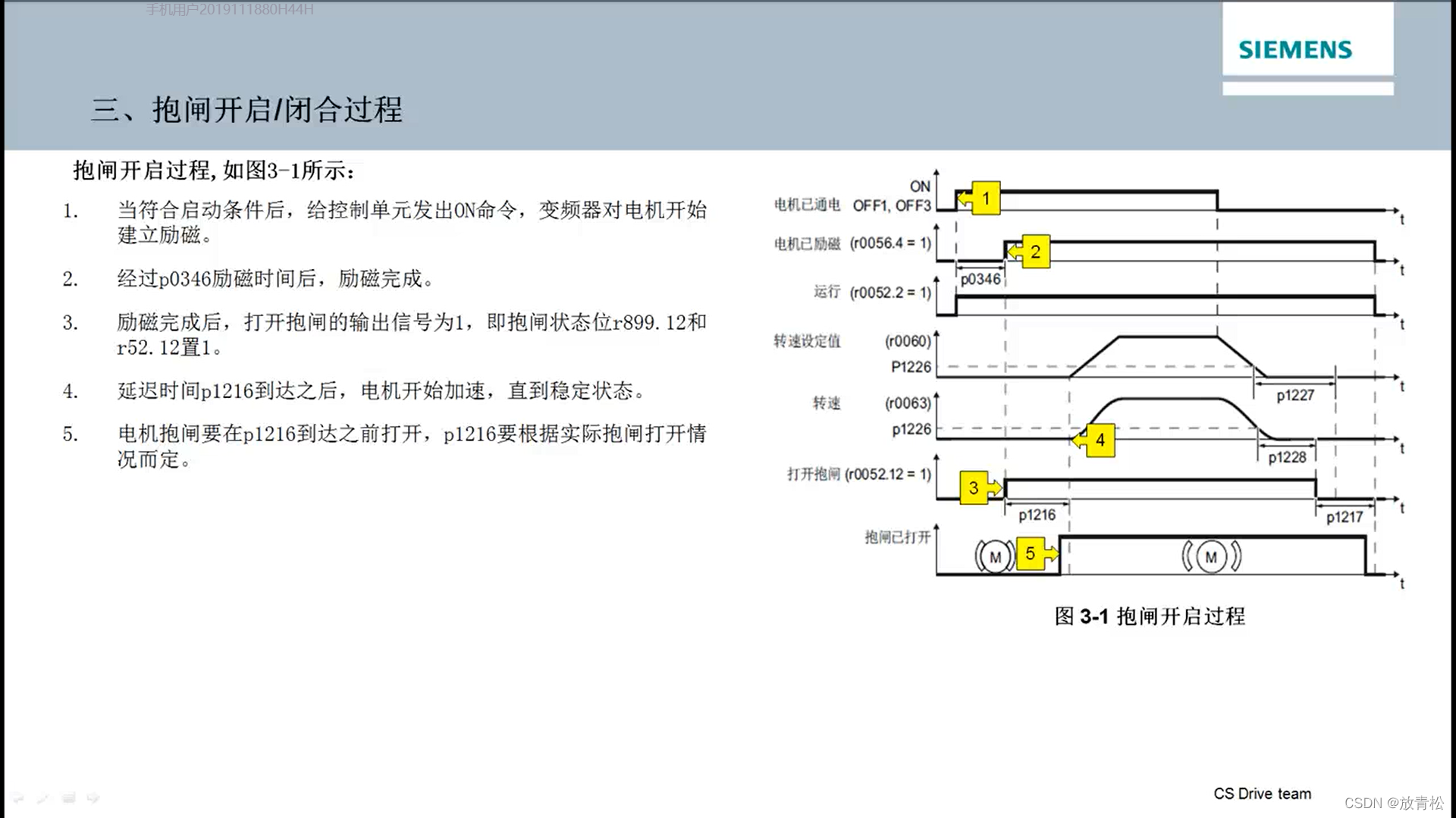
1、变频器接收到启动命令时-----输出电流对电机进行励磁,经过P346电机励磁时间(==丹佛斯 设置启动电流延时0.5S)------达到一定的转矩
2、变频器输出开抱闸命令,经过P1216延时打开抱闸时间(==PLC延时控制打开抱闸)
注意:抱闸实际打开时间100--300ms,P1216设置时间需要大于300ms,给机械抱闸打开留有时间
3、变频器开始输出电压和频率控制电机运行
4、加速时间不能太短,变频器没有过流报警
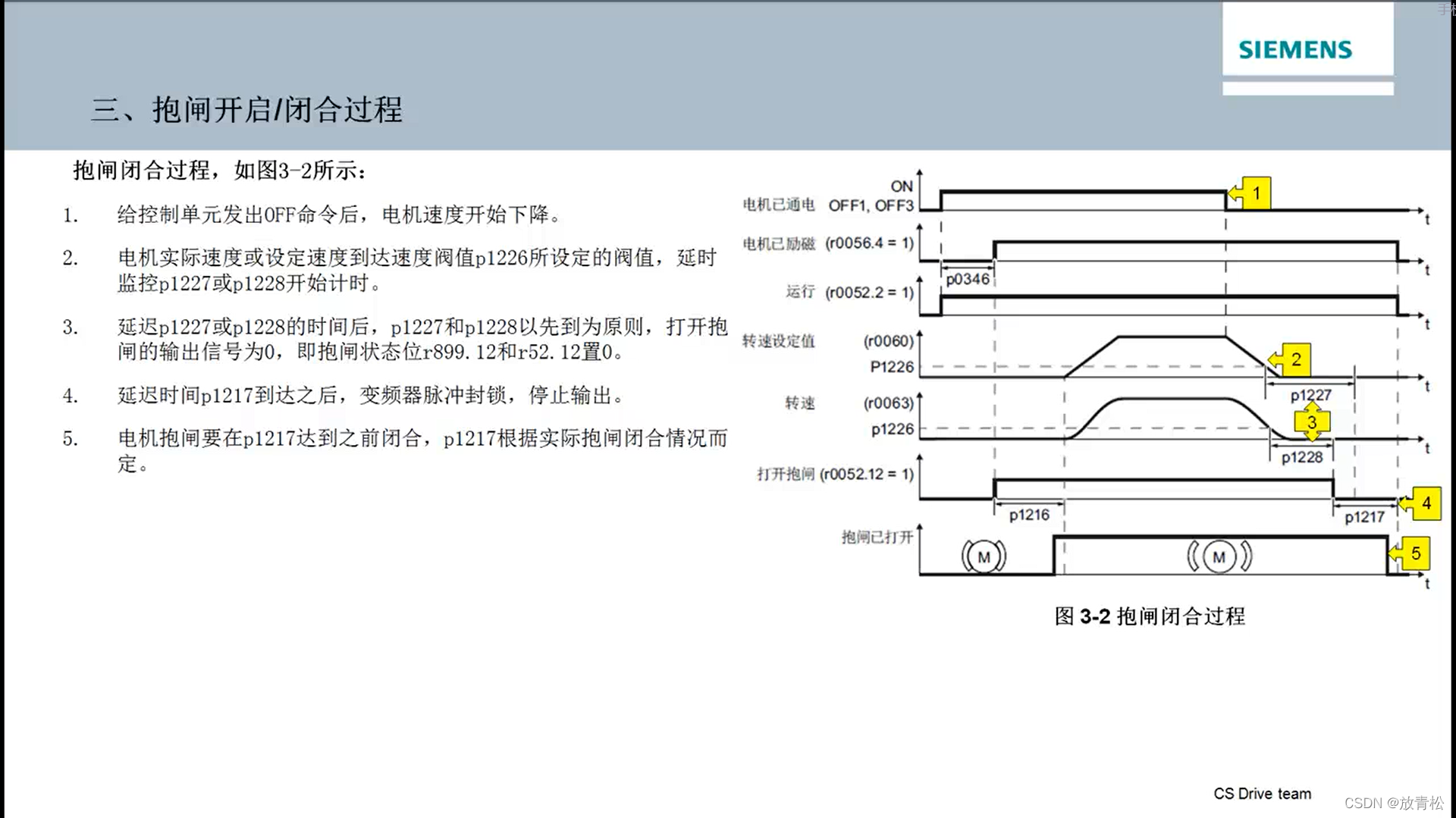
停止:
1、变频器接收到停止指令时-----开始控制电机减速,此时变频器同时检测设定转速和实际转速,这两个任何一个转速导到达P1226电机关闭转速时,开始跑各自的延时(设定转速:P1227延时、
实际转速:P1228延时)
2、延时结束后,变频器开始输出关抱闸指令、经过P1217关抱闸延时(==PLC延时控制打开抱闸),变频器开始去磁
3、减速时间不能太短,变频器没有过流报警
注意:抱闸实际关闭时间100--300ms,P1217设置时间需要大于300ms,给机械抱闸关闭留有时间
三、提升机参数设置实例
启动阶段调整参数:
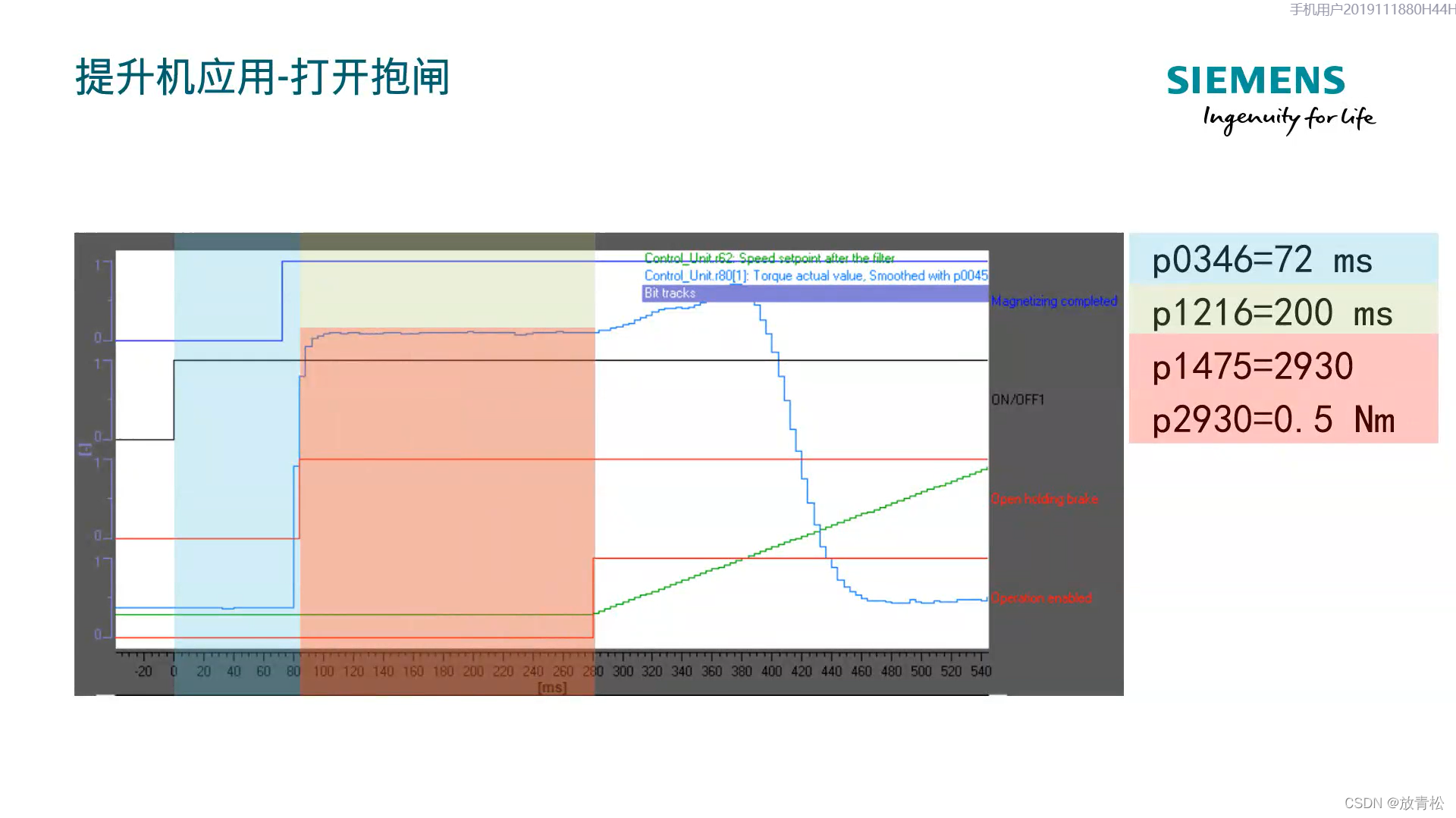
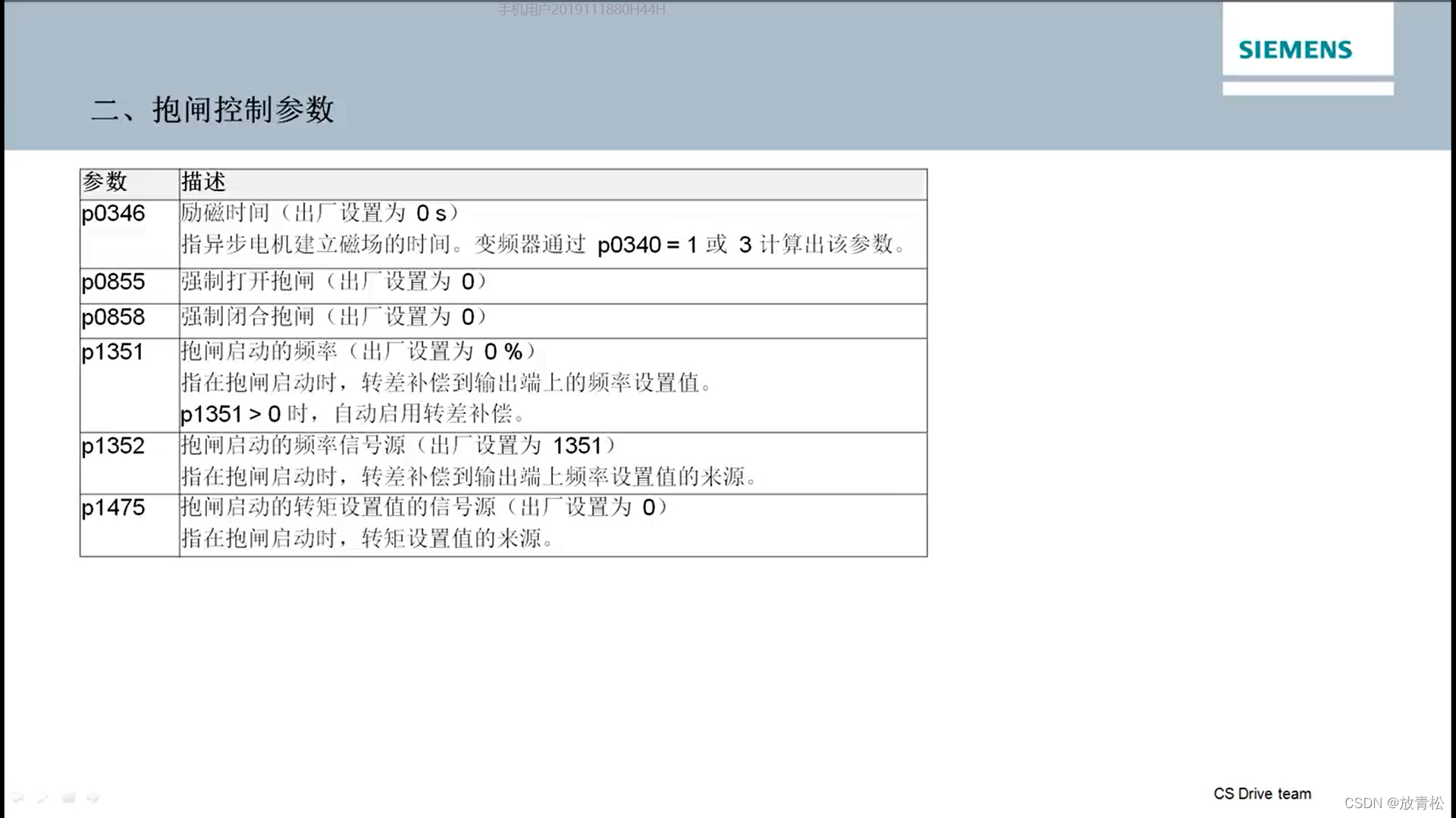
1、设置P1475,在P1216打开抱闸时间内有启动转矩(====丹佛斯 设置启动转矩),防止电机在有转速之前,抱闸提前打开
停止阶段调整参数:
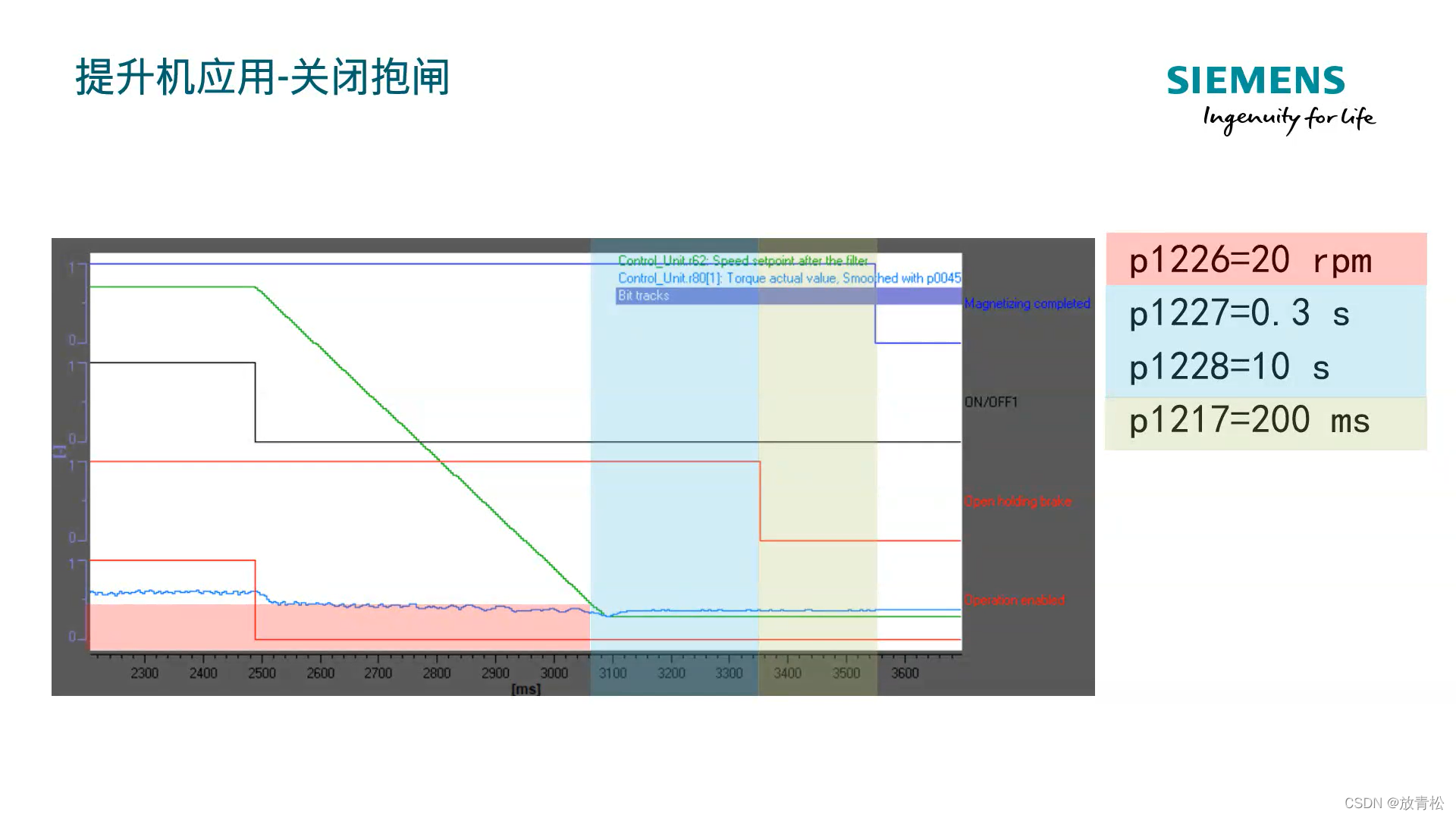
1、增大电机关闭转速P1226、同时减小P1227、P1228延时时间,让变频器提前关闭抱闸
2、增大P1217电机抱闸延时时间、保证电机抱闸实际关闭之前,电机保持励磁状态
四、抱闸控制参数介绍
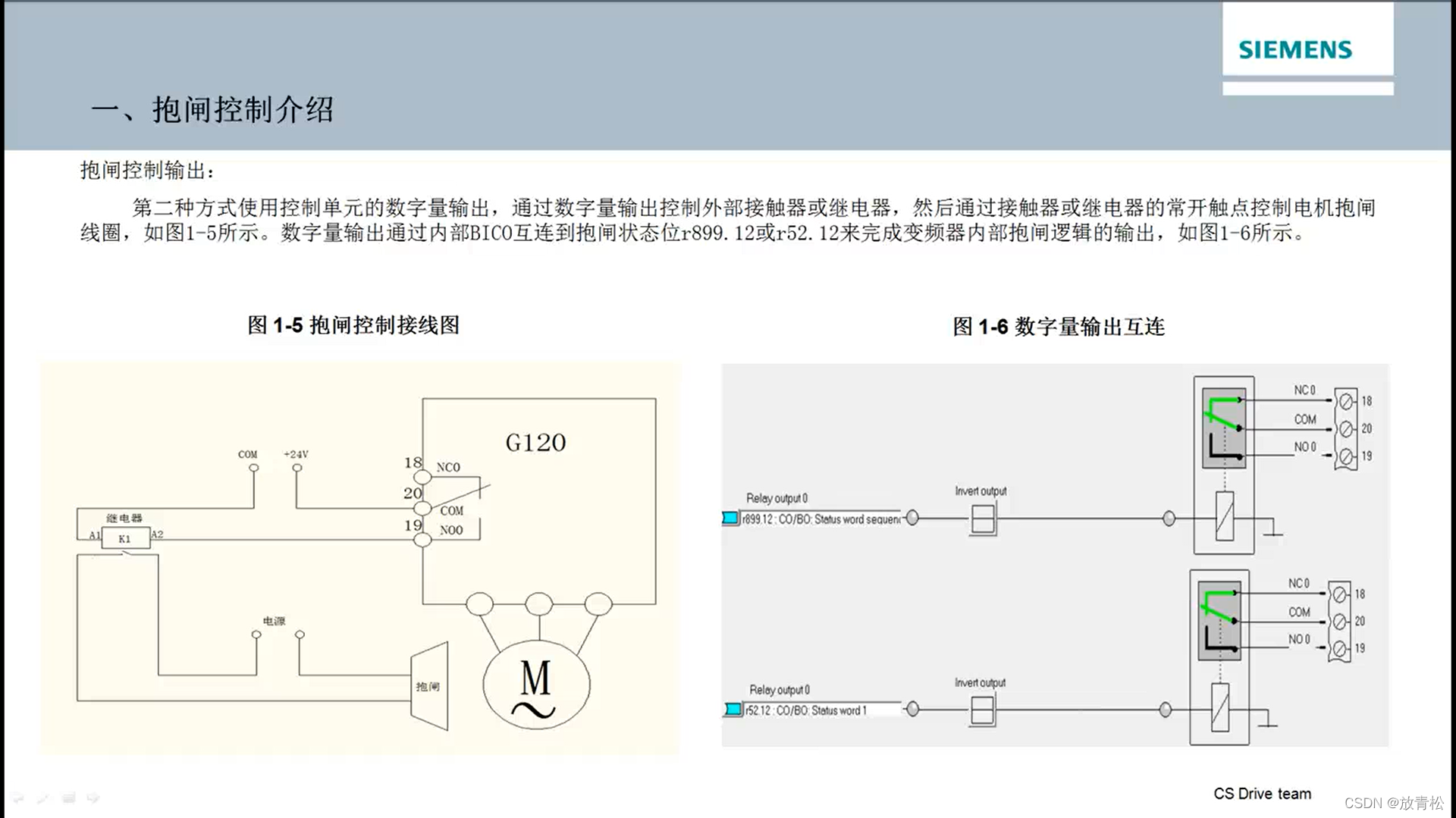
①PLC收到变频器打开抱闸信号、(行走/货叉)立即打开抱闸/(提升)延时50ms打开抱闸
②P1216变频器延时抱闸时间>接触器吸合时间55ms+抱闸动作所需时间(300ms)
备注:矢量控制时,参数设置留有励磁时间,程序可以不延时打开抱闸;
①PLC收到变频器关闭抱闸信号、延时抱闸(70ms--300ms)
②P1217变频器延时抱闸时间>PLC程序延时抱闸时间+接触器断开时间20ms+抱闸动作所需时间(300ms)
V/F调频:
1、在P1216等待时间内,变频器输出P1351=50% 额定滑差频率百分数的值,作为抱闸开启时的电机转矩,保证抱闸打开后、速度输出前、保持住电机
2、在P1217等待时间内,变频器输出P1351=50% 额定滑差频率百分数的值,作为抱闸闭合时的电机转矩,保证抱闸闭合前、速度输出为0之后、保持住电机
矢量控制:
1、在P1216等待时间内,变频器输出P1475=P2900=50% 额定滑差频率百分数的值,作为抱闸开启时的电机转矩,保证抱闸打开后、速度输出前、保持住电机。r80=0.82NM
2、在P1217等待时间内,r80=0NM,r68励磁电流不一定能维持住电机,所以通过设置P1217延时时间提前关闭抱闸
静态优化与动态优化

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 12
12 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)