python实现6自由度机械臂的五次多项式插值轨迹规划
提示:已经熟悉多项式插值法的可以直接跳转代码部分多项式插值(polynomial interopolation)是机械臂常见的轨迹规划方法,适用于关节空间内的规划,在机械臂规划过程中能够有效的减少抖动,增加机械臂使用寿命。但是我搜索CSDN上寻找用python实现的代码较少,MATLAB中的库又过于集成,并且在实际项目中无法应用,故自己研究了一下产生笔记如下,供各位参考。正文开始,代码可供参考,转
前言
提示:已经熟悉多项式插值法的可以直接跳转代码部分
多项式插值(polynomial interopolation)是机械臂常见的轨迹规划方法,适用于关节空间内的规划,在机械臂规划过程中能够有效的减少抖动,增加机械臂使用寿命。
但是我搜索CSDN上寻找用python实现的代码较少,MATLAB中的库又过于集成,并且在实际项目中无法应用,故自己研究了一下产生笔记如下,供各位参考。
正文开始,代码可供参考,转载需注明
一、五次多项式插值法理论分析
如果要确定在路径曲线段的起始点和终止点的位置、速度和加速度,需要用一个五次多项式进行插值。
关于三次多项式插值和五次多项式的插值法在《机器人学导论》这本书中有系统的推导过程,在此只给出五次多项式的推导过程。
给出五次多项式如下:
θ ( t ) = a 0 + a 1 t + a 2 t 2 + a 3 t 3 + a 4 t 4 + a 5 t 5 \theta(t) = a_0+a_1t+a_2t^2+a_3t^3+a_4t^4+a_5t^5 θ(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
始末状态对应的是 θ 0 \theta_0 θ0与 θ f \theta_f θf,可以得到约束条件见下:
θ 0 = a 0 θ f = a 0 + a 1 t f + a 2 t f 2 + a 3 t f 3 + a 4 t f 4 + a 5 t f 5 θ 0 ˙ = a 1 θ f ˙ = a 1 + 2 a 2 t f + 3 a 3 t f 2 + 4 a 4 t f 3 + 5 a 5 t f 4 θ 0 ¨ = 2 a 2 θ f ¨ = 2 a 2 + 6 a 3 t f + 12 a 4 t f 2 + 20 a 5 t f 3 \theta_0= a_0\\ \theta_f= a_0+a_1t_f+a_2t_f^2+a_3t_f^3+a_4t_f^4+a_5t_f^5\\ \dot{\theta_0}= a_1\\ \dot{\theta_f}= a_1+2a_2t_f+3a_3t_f^2+4a_4t_f^3+5a_5t_f^4\\ \ddot{\theta_0}= 2a_2\\ \ddot{\theta_f}= 2a_2+6a_3t_f+12a_4t_f^2+20a_5t_f^3\\ θ0=a0θf=a0+a1tf+a2tf2+a3tf3+a4tf4+a5tf5θ0˙=a1θf˙=a1+2a2tf+3a3tf2+4a4tf3+5a5tf4θ0¨=2a2θf¨=2a2+6a3tf+12a4tf2+20a5tf3
这些约束条件确定了一个具有6个方程和6个未知数的线性方程组,其解如下(通过矩阵求解求出):
a 0 = θ 0 a 1 = θ 0 ˙ a 2 = θ 0 ¨ 2 a 3 = 20 θ f − 20 θ 0 − ( 8 θ ˙ f + 12 θ ˙ 0 ) t f − ( 3 θ ¨ 0 − θ ¨ f ) t f 2 2 t f 3 a 4 = 30 θ 0 − 30 θ f + ( 14 θ ˙ f + 16 θ ˙ 0 ) t f + ( 3 θ ¨ 0 − 2 θ f ) t f 2 2 t f 4 a 5 = 12 θ f − 12 θ 0 − ( 6 θ ˙ f + 6 θ ˙ 0 ) − ( θ ¨ 0 − θ ¨ f ) t f 2 2 t f 5 a_0=\theta_0\\ a_1=\dot{\theta_0}\\ a_2=\frac{\ddot{\theta_0}}{2}\\ \begin{array}{l} a_{3}=\frac{20 \theta_{f}-20 \theta_{0}-\left(8 \dot{\theta}_{f}+12 \dot{\theta}_{0}\right) t_{f}-\left(3 \ddot{\theta}_{0}-\ddot{\theta}_{f}\right) t_{f}^{2}}{2 t_{f}^{3}} \\ a_{4}=\frac{30 \theta_{0}-30 \theta_{f}+\left(14 \dot{\theta}_{f}+16 \dot{\theta}_{0}\right) t_{f}+\left(3 \ddot{\theta}_{0}-2 \theta_{f}\right) t_{f}^{2}}{2 t_{f}^{4}} \\ a_{5}=\frac{12 \theta_{f}-12 \theta_{0}-\left(6 \dot{\theta}_{f}+6 \dot{\theta}_{0}\right)-\left(\ddot{\theta}_{0}-\ddot{\theta}_{f}\right) t_{f}^{2}}{2 t_{f}^{5}} \end{array} a0=θ0a1=θ0˙a2=2θ0¨a3=2tf320θf−20θ0−(8θ˙f+12θ˙0)tf−(3θ¨0−θ¨f)tf2a4=2tf430θ0−30θf+(14θ˙f+16θ˙0)tf+(3θ¨0−2θf)tf2a5=2tf512θf−12θ0−(6θ˙f+6θ˙0)−(θ¨0−θ¨f)tf2
二、python代码实现
话不多说,直接上代码:
1. 代码
# encoding: utf-8
import numpy as np
from scipy.interpolate import CubicHermiteSpline
import matplotlib as mpl
import matplotlib.pyplot as plt
import math
# 给定关节起始位置
start_angle = np.array([15, 34, 56, 34, 66, 90])
end_angle = np.array([75, 45, 45, 56, 43, 70])
# 我用的角度,如果需要弧度可以放开下面的两行代码
# start_angle = np.deg2rad(start_angle1)
# end_angle = np.deg2rad(end_angle1)
# 设定起始时间
start_time = 0
end_time = 5
t_time = np.array([0, 0, 0, 0, 0, 0])
# 给定关节始末角速度与角加速度
start_vel = np.array([0, 0, 0, 0, 0, 0])
end_vel = np.array([0, 0, 0, 0, 0, 0])
start_acc = np.array([0, 0, 0, 0, 0, 0])
end_acc = np.array([0, 0, 0, 0, 0, 0])
# 初始化保存每个关节角度、速度和加速度随时间变化的列表
qq = []
vv = []
aa = []
# 计算a0-a5,并带入多项式中求解曲线
for i in range(len(start_angle)):
# i = 1
# print(len(start_angle))
#初始状态
t=[t_time[0]]
q=[start_angle[i]]
v=[start_vel[i]]
a=[start_acc[i]]
a0 = start_angle[i]
a1 = start_vel[i]
a2 = start_acc[i]
# print(30*start_angle[i]-30*start_angle[0])
a3 = (20*end_angle[i]-20*start_angle[i]-(8*end_vel[i]+12*start_vel[i])*end_time-(3*end_acc[i]-start_acc[i])*math.pow(end_time, 2))/(2 * math.pow(end_time, 3))
a4 = (30*start_angle[i]-30*end_angle[i]+(14*end_vel[i]+16*start_vel[i])*end_time+(3*end_acc[i]-2*start_acc[i])*math.pow(end_time, 2))/(2 * math.pow(end_time, 4))
a5 = (12*end_angle[i]-12*start_angle[i]-(6*end_vel[i]+6*start_vel[i])*end_time-(end_acc[i]-start_acc[i])*math.pow(end_time, 2))/(2 * math.pow(end_time, 5))
# print(a0,a1,a2,a3,a4,a5)
ti = np.arange(start_time, end_time, .01)
# 求解出角度,角速度,角加速度随某个时间区间随时间变换的曲线
qi = a0 + a1 * ti + a2 * np.power(ti, 2) + a3 * np.power(ti, 3) + a4 * np.power(ti, 4) + a5 * np.power(ti, 5)
vi = a1 + 2 * a2 * ti + 3 * a3 * np.power(ti , 2) + 4 * a4 * np.power(ti, 3) + 5 * a5 * np.power(ti, 4)
ai = 2 * a2 + 6 * a3 * ti + 12 * a4 * np.power(ti, 2) + 20 * a5 * np.power(ti, 3)
# # 将矩阵转换为List,否则进行数据整合会报错
ti = ti.tolist()
qi = qi.tolist()
vi = vi.tolist()
ai = ai.tolist()
# print(ai)
#进行数据整合,用来绘制函数图像
t = t + ti[1:]
q = q + qi[1:]
v = v + vi[1:]
a = a + ai[1:]
# print(type(q))
qq.append(q)
vv.append(v)
aa.append(a)
# 绘制图像
plt.figure()
for j in range(len(start_angle)):
plt.subplot(3,2,j+1)
plt.plot(t, qq[j], linestyle=":", color=(1, 0, 0, 1.0), label="angle curve") # 角度变化曲线
plt.plot(t, vv[j], linestyle="-", color=(1, 0.5, 1, 1.0), label="speed curve") # 角速度变化曲线
plt.plot(t, aa[j], linestyle="-.", color=(0, 0, 0, 1.0), label="acceleration curve") # 角加速度变化曲线
plt.title("Angle {}".format(j+1))
plt.xlabel("Time (s)", x=1)
# plt.rcParams['font.size'] = 15 #设置字体大小
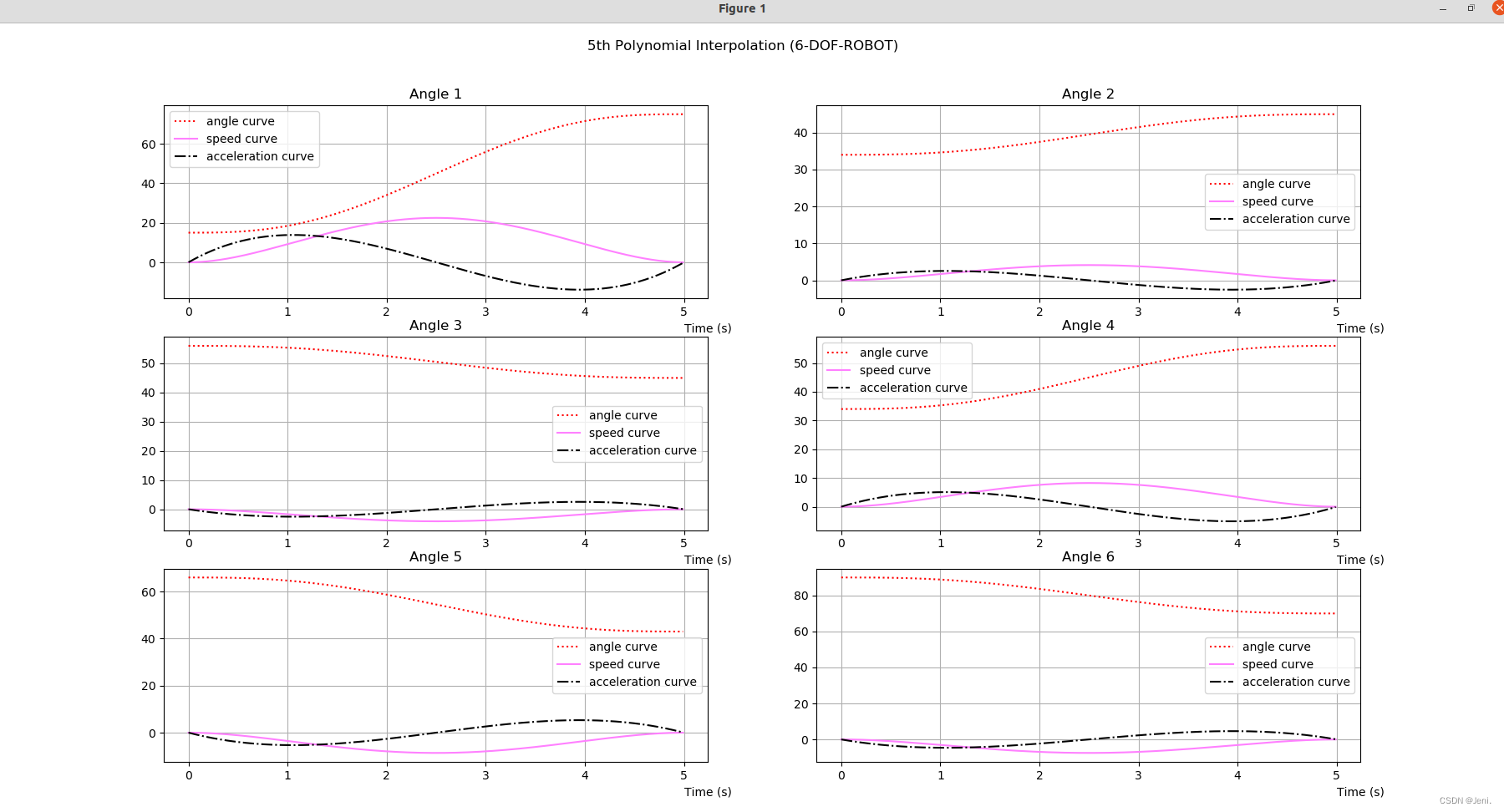
plt.suptitle("5th Polynomial Interpolation (6-DOF-ROBOT)")
plt.grid() # 显示网格
plt.legend() # 显示图例
plt.tight_layout() # 调整子图布局
plt.show()
2. 结果
画出来的结果如下
OK!美滋滋结束 😉
总结
以上就是五次多项式插值法的python实现,本文只是简单给出了机械臂插值法的定义与应用代码,在实际应用中还需要根据具体情况进行修改,后续我会继续更新机械臂规划相关的学习心得,欢迎交流。
参考书籍
[1]机器人学导论,John J.Craig,斯坦福大学

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)