使用Ubuntu20.04+ROS标定Azure Kinect DK深度相机
使用 Ubuntu20.04+ROS 标定 Azure Kinect DK 深度相机,包括彩色相机和红外相机的标定。具体是通过结合相机的ros驱动Azure_Kinect_ROS_Driver与相机标定的ros包image_pipeline进行标定。
目录
2、 下载 kinect 的 ros 驱动 Azure_Kinect_ROS_Driver
3、 下载深度相机标定的 ros 包 image_pipeline
一、软件准备
1、创建一个 ros 工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
2、 下载 kinect 的 ros 驱动 Azure_Kinect_ROS_Driver
(clone失败可直接去官网下载)
cd src
git clone https://github.com/microsoft/Azure_Kinect_ROS_Driver3、 下载深度相机标定的 ros 包 image_pipeline
(clone失败可直接去官网下载)
git clone https://github.com/ros-perception/image_pipeline4、编译
cd ..
catkin_make二、标定
1、添加环境变量
source ./devel/setup.bash2、启动 Azure Kinect DK 摄像头
roslaunch azure_kinect_ros_driver driver.launch 3、RGB彩色相机标定
3.1 启动 rgb 相机节点
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.022 image:=/rgb/image_raw camera:=/camera/rgb
(1)如果没有成功打开窗口程序,可以增加 --no-service-check
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.022 image:=/rgb/image_raw camera:=/camera/rgb --no-service-check
(2)相关参数
① --size 11x8:小方格角点数量(长x宽)
② --square 0.022:小方格的边长(单位:m)
③ image:=/rgb/image_raw:具体可通过rostopic list命令查看话题(我的是/rgb/image_raw,如下图。但是看到网上其它教程很多都是/camera/rgb/image_raw)
④ camera:=/camera/rgb:RGB摄像头
(3)如果出现"resource not found: rgbd_launch",可执行如下命令安装(其中noetic改成自己的ros版本号):
sudo apt-get install ros-noetic-rgbd-launch3.2 标定
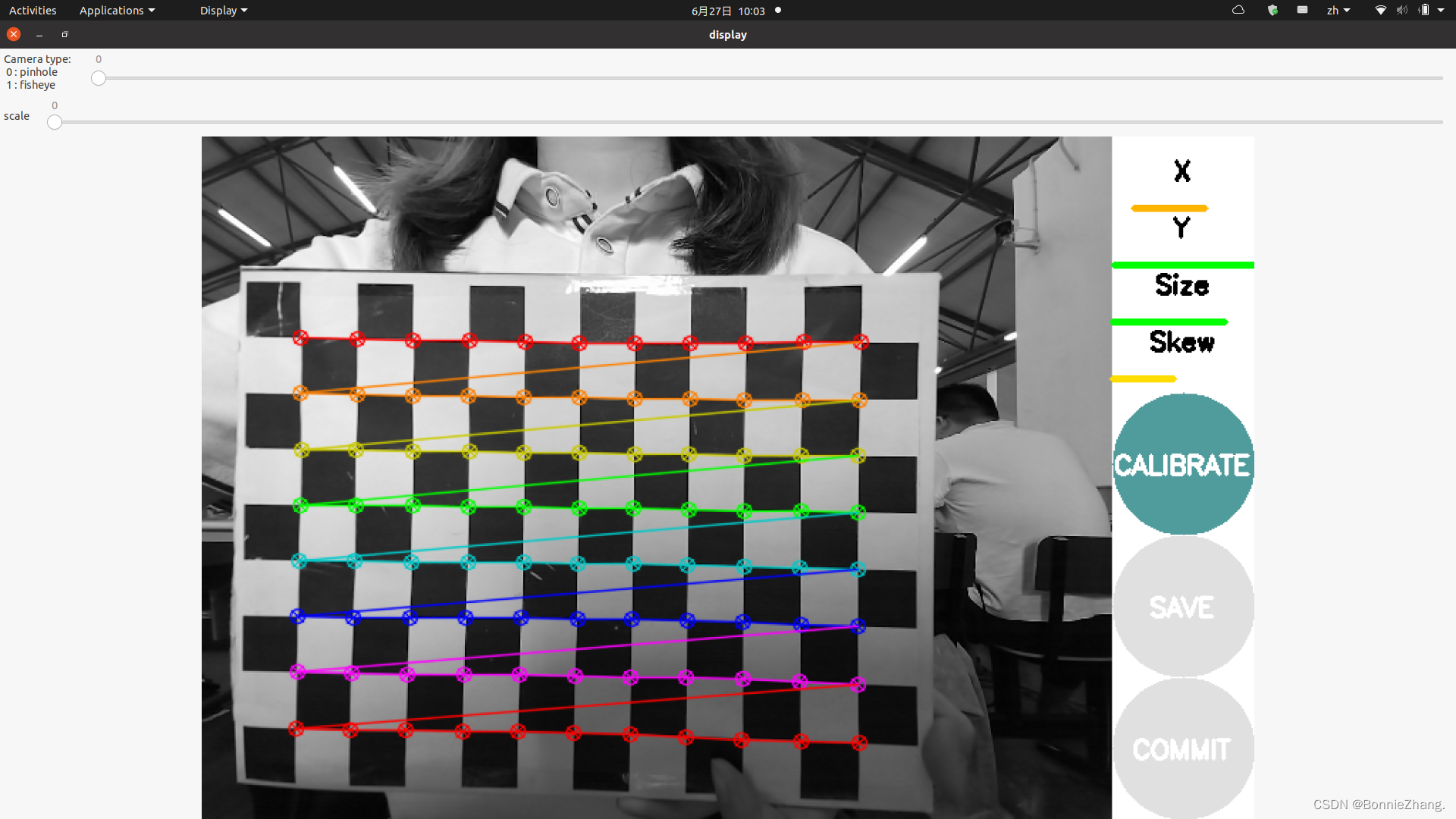
(1)移动棋盘格,使得右侧几个条的长度增加。
- X条表示视野的左右范围;
- Y条表示视野的上下范围;
- Size条表示视野的前后/远近;
- Skew条表示视野的倾斜。

(2)移动过程中,终端会保存并记录一些满足要求的图片。

(3)待“CALIBRATION”按钮高亮后,点击该按钮开始标定,标定完成后终端会显示结果。
(4)等待标定完成后,点击“SAVE”,终端显示已保存 ('Wrote calibration data to', '/tmp/calibrationdata.tar.gz')。


(5) 在路径 /tmp 下即可找到标定结果的压缩包 calibrationdata.tar.gz。
4、深度相机标定
4.1 启动 ir 相机节点
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.022 image:=/ir/image_raw camera:=/camera/ir --no-service-check
4.2 标定
同rgb相机(3.2)


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)