【ROS】Ubuntu18.04安装ROS
ros是一种分布式机器人操作系统,依赖于linux(一般支持的linux系统有ubuntu系列与debian系列),由斯坦福发布,目前,很多机器人的研究都是基于它。打开终端,输入roscore命令,可以看到ROS已经成功在ubuntu上运行起来。执行以下环境配置命令(一键安装已经配置,为了确保可以再手动配置一次)执行下面的命令,然后按照脚本指示文件操作即可。根据ubuntu的版本选择ros的版本。
·
Ubuntu18.04安装ROS
引言
参考链接:ros操作系统入门
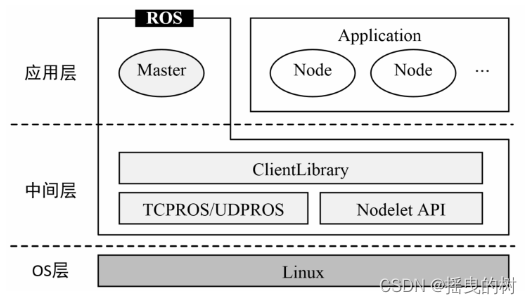
ros是一种分布式机器人操作系统,依赖于linux(一般支持的linux系统有ubuntu系列与debian系列),由斯坦福发布,目前,很多机器人的研究都是基于它。其基本框架如下: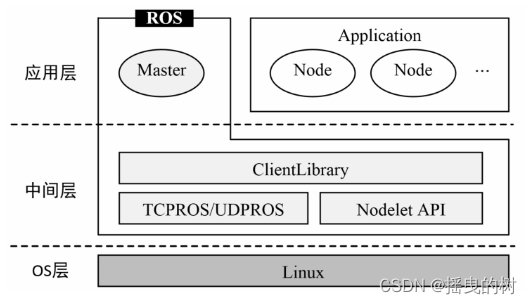
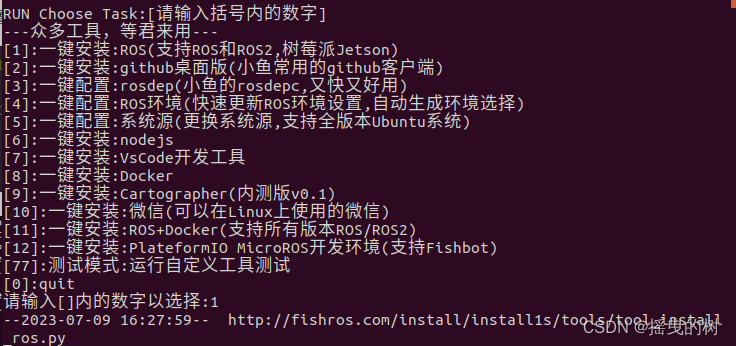
1 ROS安装(一键式)
参考链接:https://github.com/fishros/install
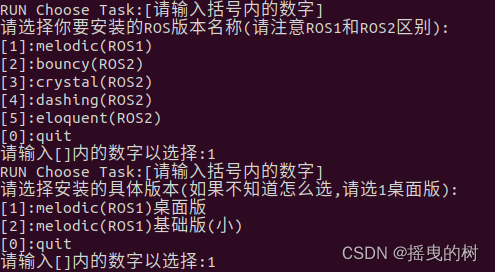
执行下面的命令,然后按照脚本指示文件操作即可
wget http://fishros.com/install -O fishros && sudo ./fishros
最好选择换源!!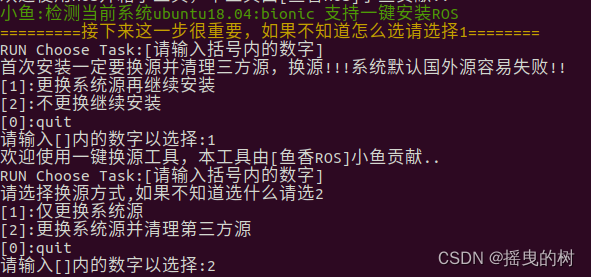
根据ubuntu的版本选择ros的版本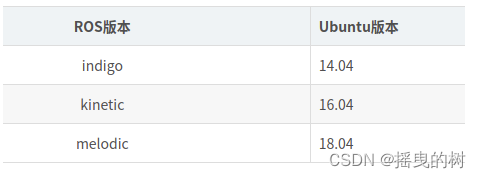

执行以下环境配置命令(一键安装已经配置,为了确保可以再手动配置一次)
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
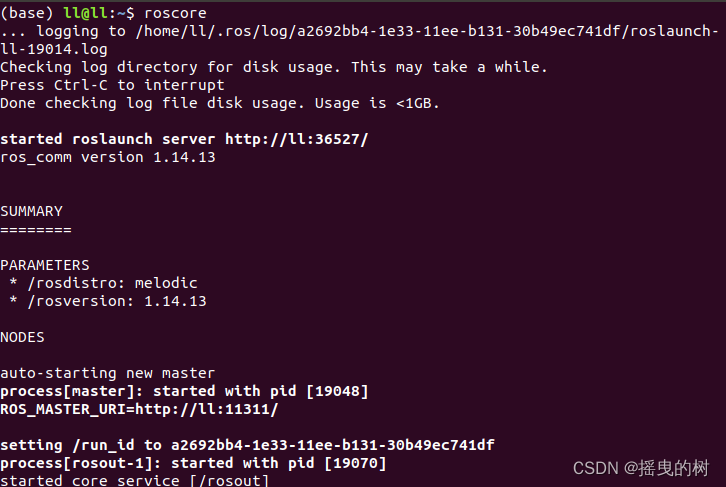
# 1. roscore 测试
roscore
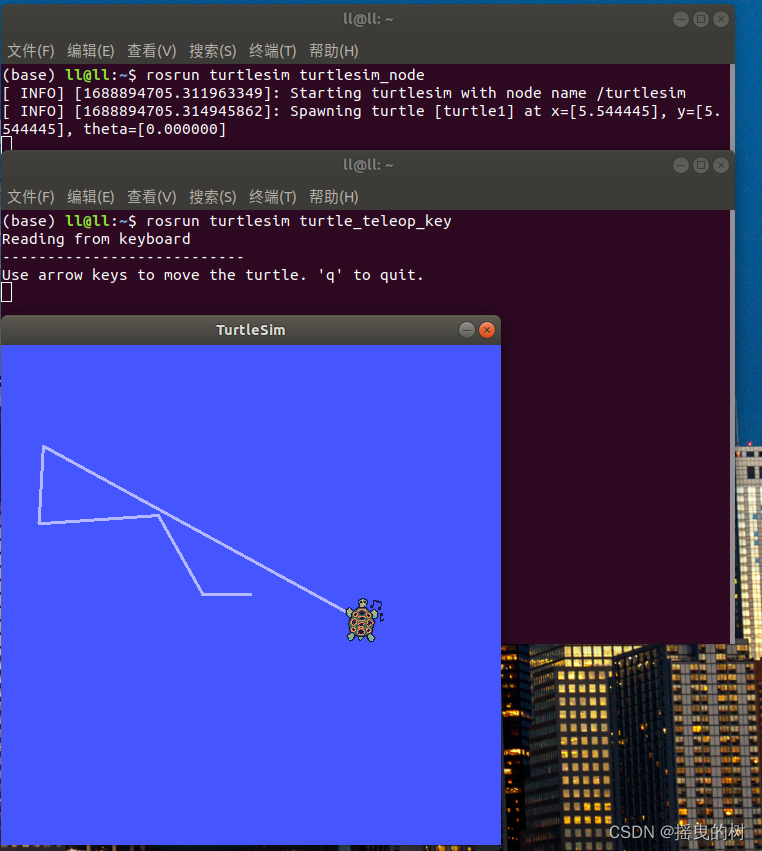
# 2. 开启第二个终端输入:
rosrun turtlesim turtlesim_node # 会出现一个小海龟
# 3. 最后开启第三个终端输入,就可以通过方向键控制海龟的移动
rosrun turtlesim turtle_teleop_key
# 4. 测试rviz
rosrun rviz rviz

2 正常安装
直接在base环境下安装
2.1 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.2 添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.3 更新
# 确保包索引是最新的
sudo apt-get update
2.4 安装ros
# 推荐安装桌面完整版(推荐): 包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知包等
sudo apt-get install ros-melodic-desktop-full
sudo apt-get install ros-melodic-rqt*
2.5 初始化 rosdep
sudo rosdep init
sudo rosdep update
常见问题:
1、ERROR:cannot download default sources list fromhttps://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down
# 解决办法:打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
185.199.108.133 raw.githubusercontent.com
185.199.109.133 raw.githubusercontent.com
185.199.110.133 raw.githubusercontent.com
185.199.111.133 raw.githubusercontent.com
#保存后退出再尝试
2、rosdep update 超时
# 解决办法:更新源
sudo apt-get update
# 安装python-rosdep
sudo apt-get install python-rosdep
2.6 设置环境
添加ROS环境变量
gedit ~/.bashrc
然后复制以下内容:
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
# Set ROS Network
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
# Set ROS alias command 快捷指令
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'
配置ROS环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
创建工作目录 并 初始化
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
编译
cd catkin_ws
catkin_make
2.7 安装rosinstall,便利的工具
# SQL
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
# Nginx
sudo apt install ros-melodic-jsk-rviz-plugins
安装一些需要的依赖:
#升级PIP
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pip -U
#还源PIP
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
#下载依赖
sudo apt install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin
sudo apt install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
pip3 install -U setuptools
#ROS-full-deskdop
sudo apt-get install ros-melodic-jsk-recognition-msgs ros-melodic-jsk-rviz-plugins ros-melodic-lanelet2* ros-melodic-nmea* ros-melodic-grid-map* ros-melodic-automotive-* ros-melodic-velodyne* ros-melodic-gps-common ros-melodic-qpoases-vendor
2.8 检验
打开终端,输入roscore命令,可以看到ROS已经成功在ubuntu上运行起来
3 rviz将bag数据可视化为点云
准备好.bag数据
3.1 打开ROS和rviz软件
# 1. 打开终端(命名为终端1),运行ROS
roscore
# 2. 新建一个终端(命名为终端2),打开RVIZ软件
rosrun rviz rviz
3.2 配置rviz软件可视化点云
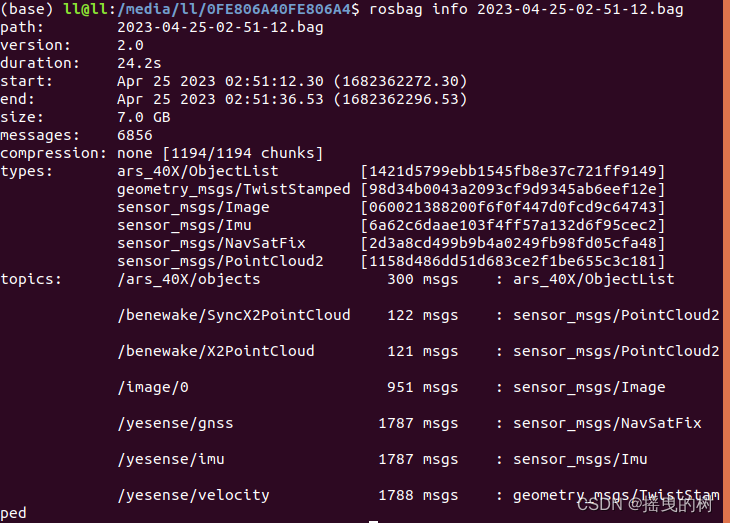
# 1 查看.bag文件的信息,特别是topics
rosbag info 2023-04-25-02-51-12.bag
# 2. 播放.bag文件,只有在播放的过程中才能配置rviz
rosbag play 2023-04-25-02-51-12.bag -l
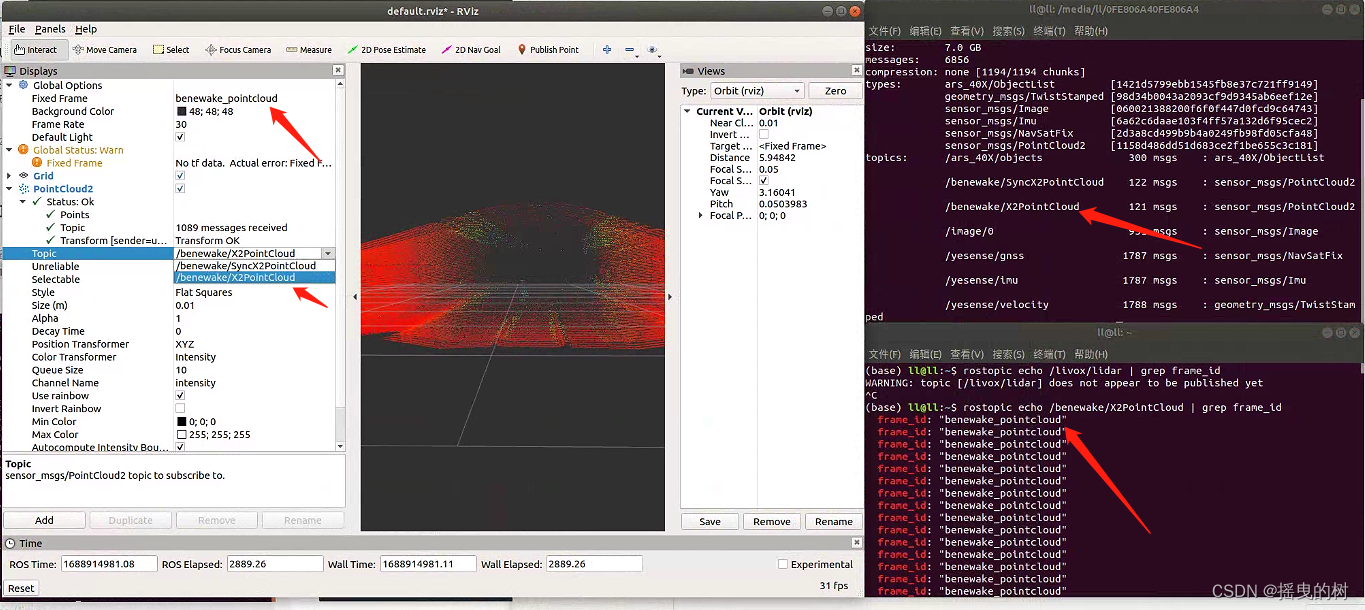
# 3. 查看PointCloud2的Fixed Frame
rostopic echo /benewake/X2PointCloud | grep frame_id
# 4.手动Add,PointCloud2如图所示
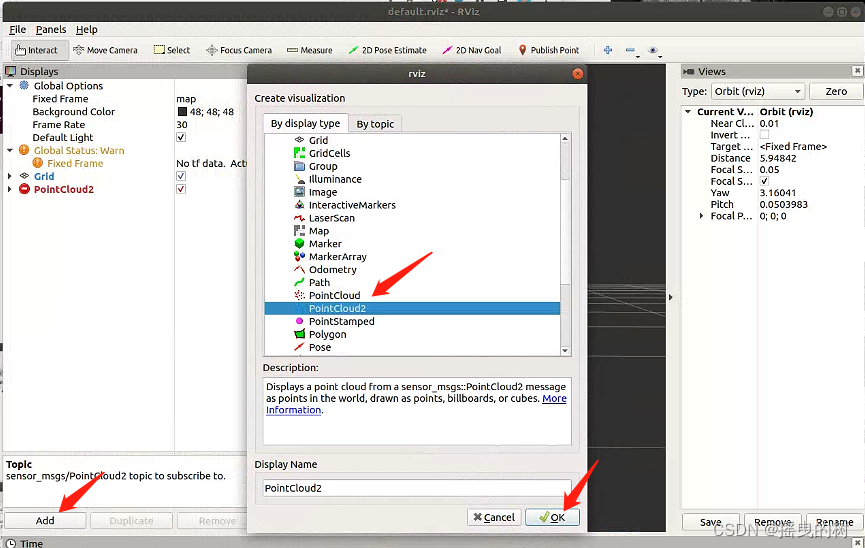
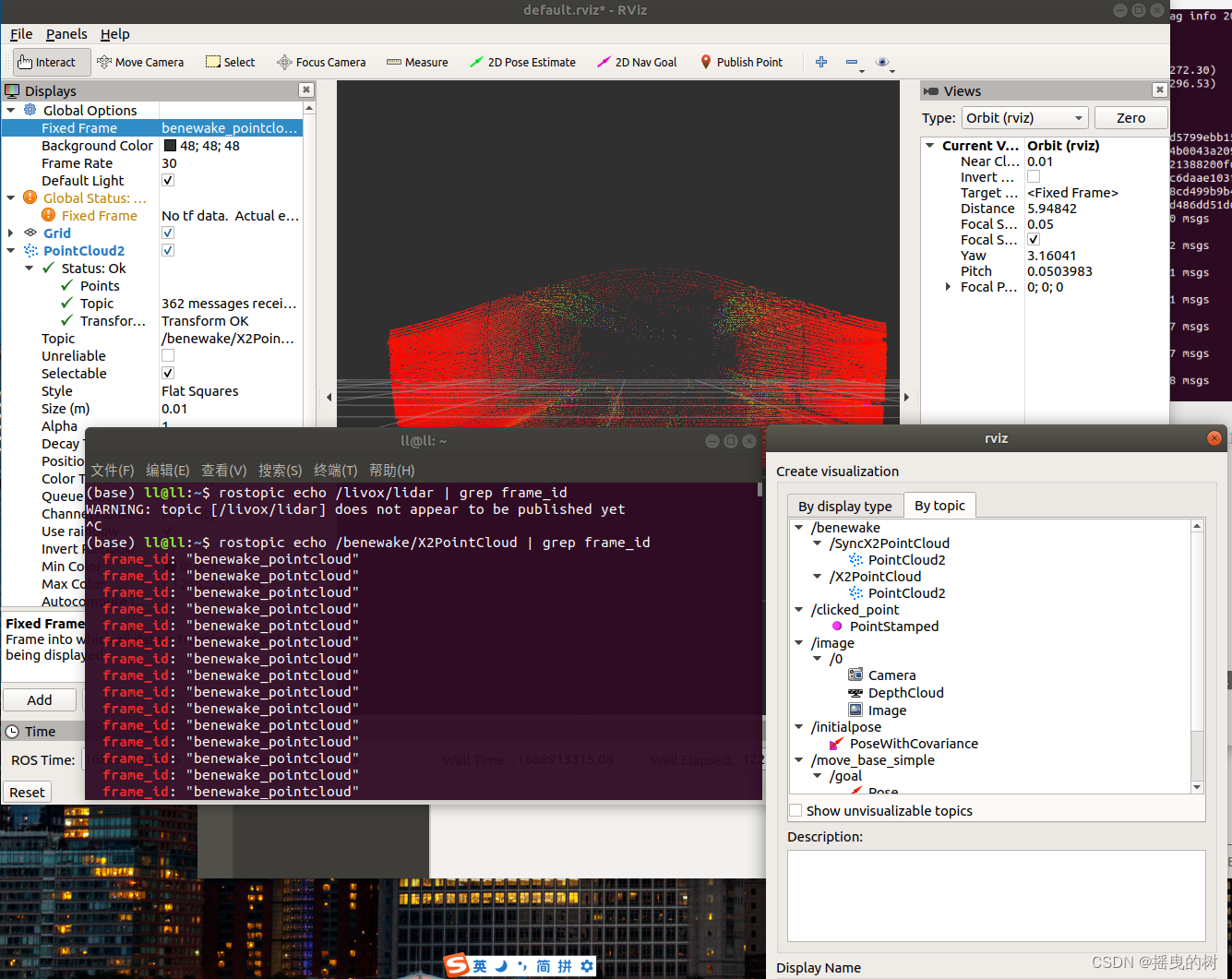
# 5. 配置Topic(直接选择)和Fixed Frame(根据步骤3)
4 open3d可视化pcl文件
4.1 安装open3d
pip install open3d
4.2 执行脚本
import open3d as o3d
pcd = o3d.io.read_point_cloud('/media/ll/0FE806A40FE806A4/out/pcd/5331.926511360.pcd')
o3d.visualization.draw_geometries([pcd])
显示如下图所示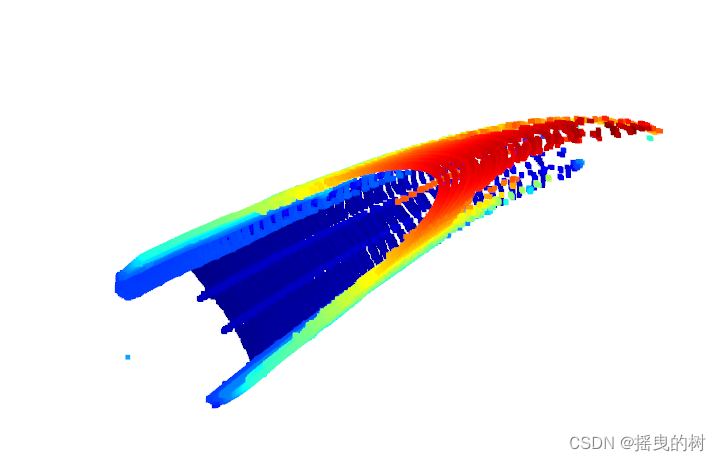
参考链接

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 3
3 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)