
zed驱动的安装 及 遇到问题 及 ros标定
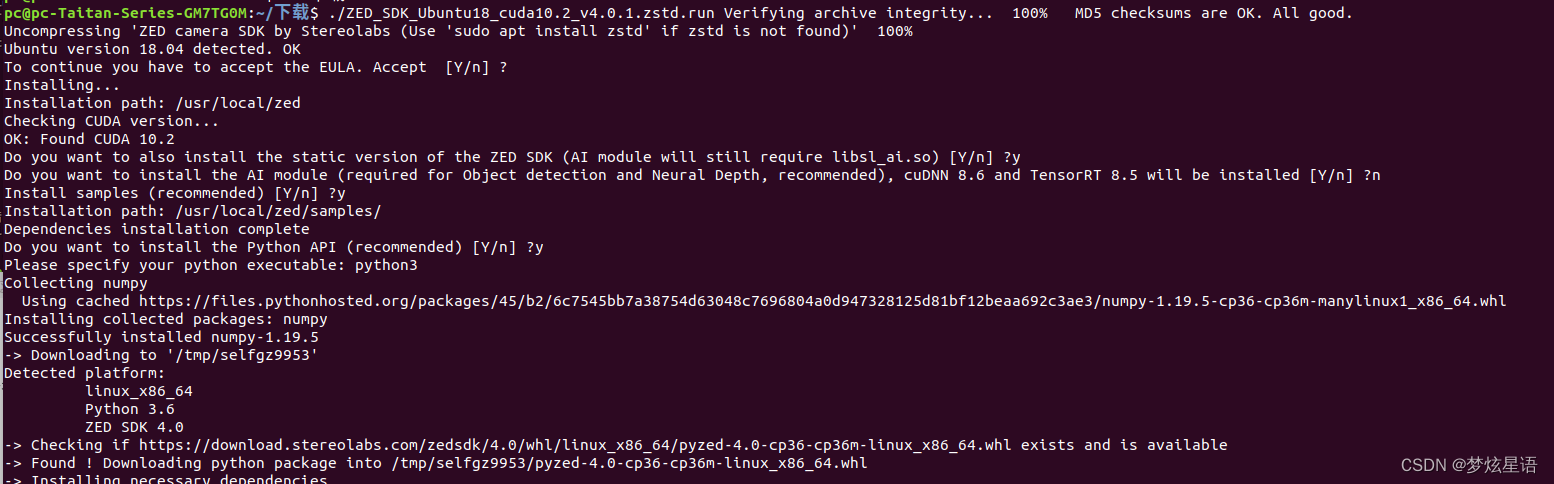
当遇到zstd: not found…Decompression failed.安装 zed 驱动,我都选了“y”,漫长的等待。重启电脑,插上zed摄像头,验证图像是否正常。最后有一个报错,但是显示安装完成。
安装zed相机驱动
下载.run文件
chmod +x ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
./ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
当遇到 zstd: not found … Decompression failed.

重新安装,执行:
sudo aptitude install zstd
若:
则:
sudo apt install aptitude
再执行:
sudo aptitude install zstd
安装 zed 驱动
./ZED_SDK_Ubuntu18_cuda10.2_v4.0.1.zstd.run #换自己的版本号
重启电脑,插上zed摄像头,验证图像是否正常
cd /usr/local/zed/tools
./ZED_Explorer # 运行ZED_Explorer
./ZED_Depth_Viewer # 观察深度数据是否正常
卸载
cd /usr/local
sudo rm -rf zed
在ros下的使用参考ZED2相机SDK安装使用及ROS下使用
若报错:
RLException: [zed.launch] is neither a launch file in package [zed_wrapper] nor is [zed_wrapper] a launch file name
The traceback for the exception was written to the log file**
这个错误的原因是没有把launch文件添加到路径中。
解决方法:
添加文件到路径中
source devel/setup.bash
重新编译,运行
catkin_make
roslaunch zed_wrapper zed.launch
标定:
标定板链接
下载zed所依赖的ros包
sudo apt-get install ros-melodic-camera-calibration
启动ZED相机
source ~/zed_ws/devel/setup.bash
roslaunch zed_wrapper zed.launch
标定双目
rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 8x6 --square 0.024 right:=/zed/zed_node/right/image_rect_color left:=/zed/zed_node/left/image_rect_color right_camera:=/zed/zed_node/right left_camera:=/zed/zed_node/left --no-service-check
–approximate -----------摄像机校准器可以处理时间戳不完全相同的图像,当前设置为 0.1 秒,意思是只要时间戳差小于 0.1 秒,标定程序就可以正常运行。
–size 8x6 -----------------当前标定板的大小-1, 参数中为字母x
–square 0.024 ----------为每个棋盘格的边长,单位为米(我的图片打印出来测量为24mm)
–image:=/camera/image_raw------图像Topic
–camera:=/camera--------------------相机名
启动界面如下,把棋盘格放到相机视野中,标定过程中 X,Y,Size 会不断变化: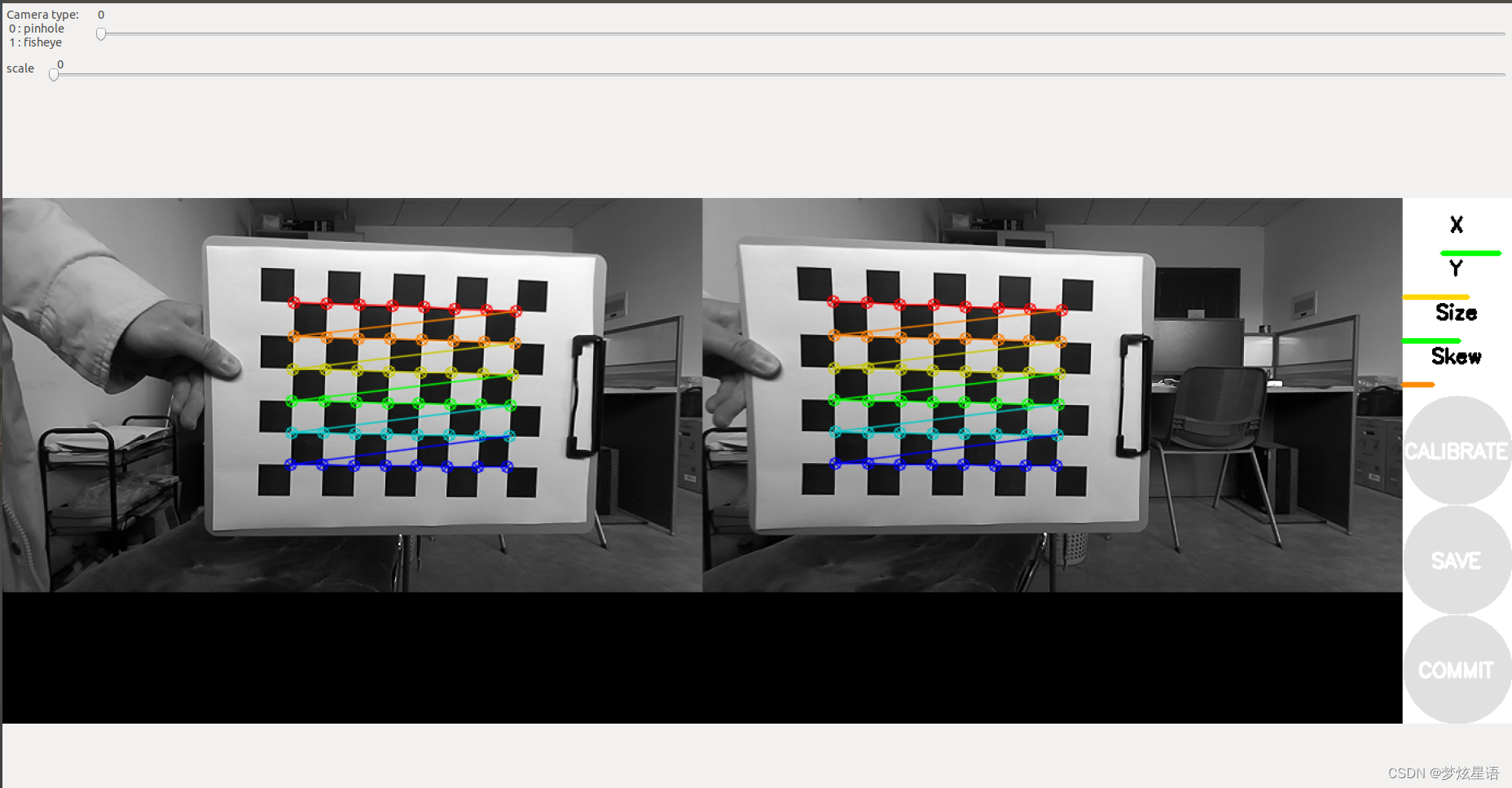
从图中可以看到,在GUI的右侧有X,Y,Size,Skew四个标志条
它们的含义是:
x:表示标定板在水平方向上的位置,从左到右逐渐变大。
y:表示标定板在垂直方向上的位置,从上到下逐渐变大。
Size:表示标定板在图中所占比例的大小,从远到近逐渐变大。
Skew:表示标定板在图像中倾斜的角度大小,随倾斜角度增大逐渐变大。
我们的工作就是从左到右、从上到下,从远到近,并且不断变换标定板的角度,使四个标志条都变为绿色。
点击CALIBRATE
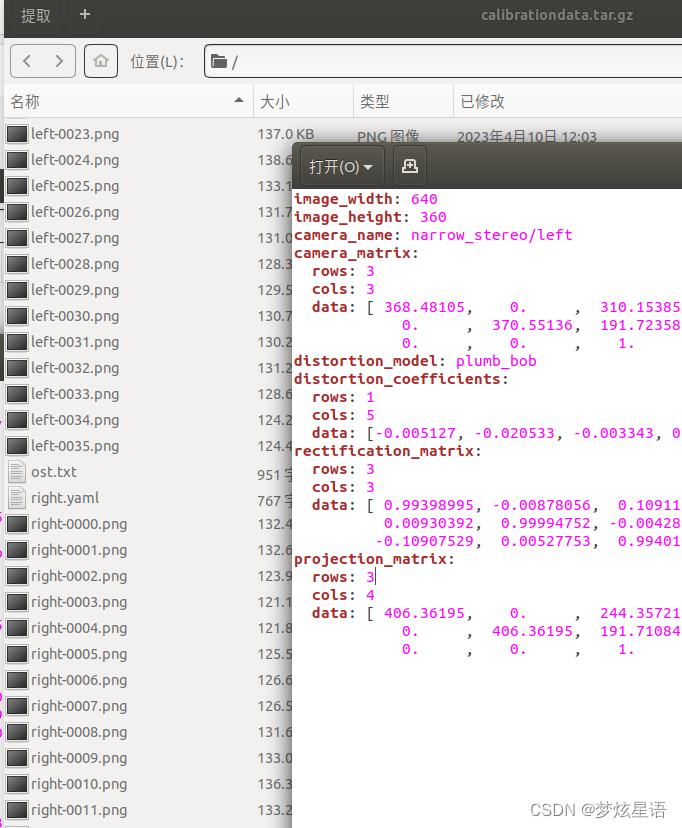
点击SAVE保存标定数据
标定数据会保存到:Computer/tmp/calibrationdate.tar.gz
打开后会得到图片和参数的详细信息:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)