USGS-ISIS处理LROC-NAC(EDR)数据,添加地理投影,转换为.tif格式
利用ISIS处理LROC-NAC(EDR)数据的详细流程
目录
1.LROC-NAC数据下载
数据介绍:Lunar Reconnaissance Orbiter Camera (LROC) Narrow Angle Cameras (NACs)——月球轨道窄角相机,是月球勘测轨道器(LRO)上的一对高分辨率推扫式(pushbroom)相机。两台相机(NAC-Left,NAC-Right)略有重叠地平行扫描月面,并同时获取图像。典型的LROC NAC图像的像素分辨率在0.5-2.0 m/px之间,部分图像的空间分辨率可达0.25-0.3 m/px,是目前分辨率最高的月球影像数据集。一个典型的NAC成对图像大约有10,000个像素宽(东西向)和52,000个像素长(南北向),对应的正常覆盖范围大小为5x26公里到20x100公里左右。NAC数据集由NASA's Planetary Data System(PDS)提供,可供公众下载。
数据下载网址:
- LROC Image Search (asu.edu)
- LROC | PDS Archive (asu.edu)
- pds-imaging.jpl.nasa.gov (需要能够访问外网)
- QuickMap
- Lunar Orbital Data Explorer - Home Page (wustl.edu)
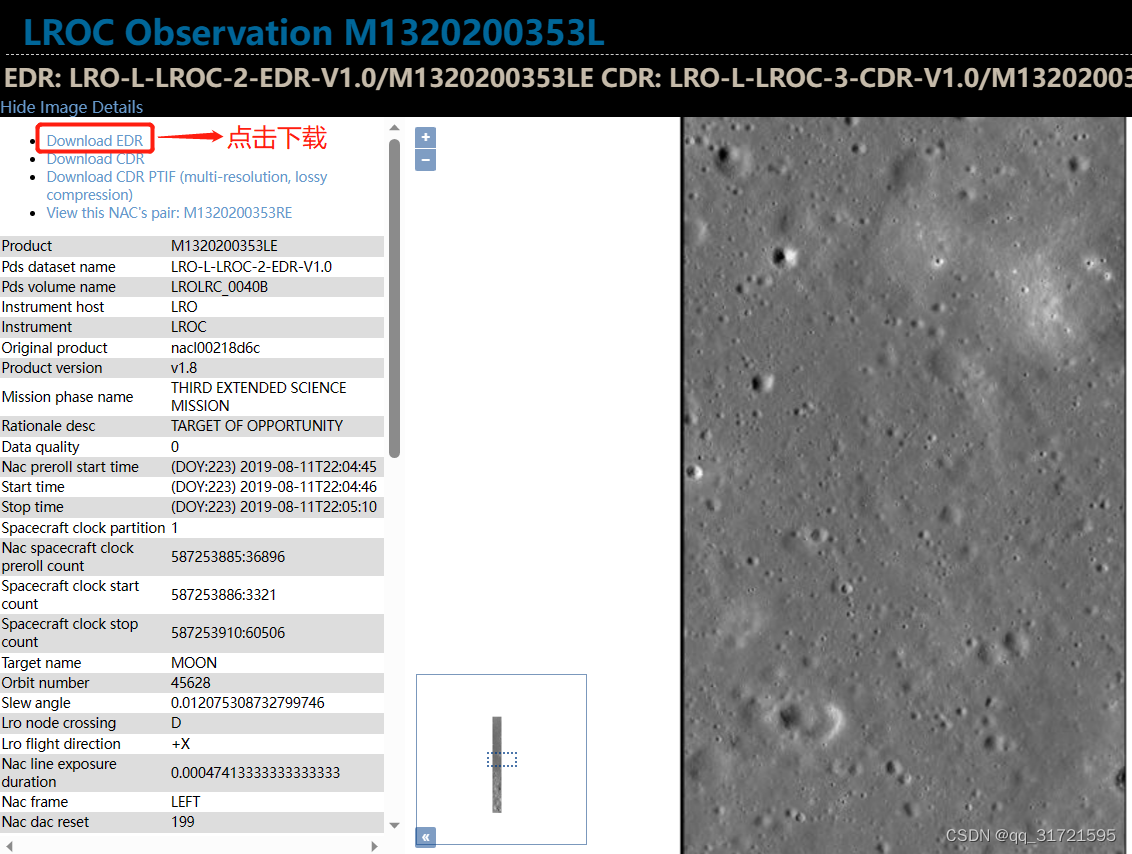
注意:获取的数据为.IMG格式,为了读取和提取图像的地理信息,需要将其转换为(.geotiff or .gtif)格式,该数据一般包括:EDR/CDR/RDR,我们下载EDR数据,CDR数据的处理比EDR更复杂。
- EDR:未经过处理的原始NAC数据;
- CDR:经过光度校正但无地理投影的NAC数据;
- RDR:经过几何校正和地理投影的NAC数据
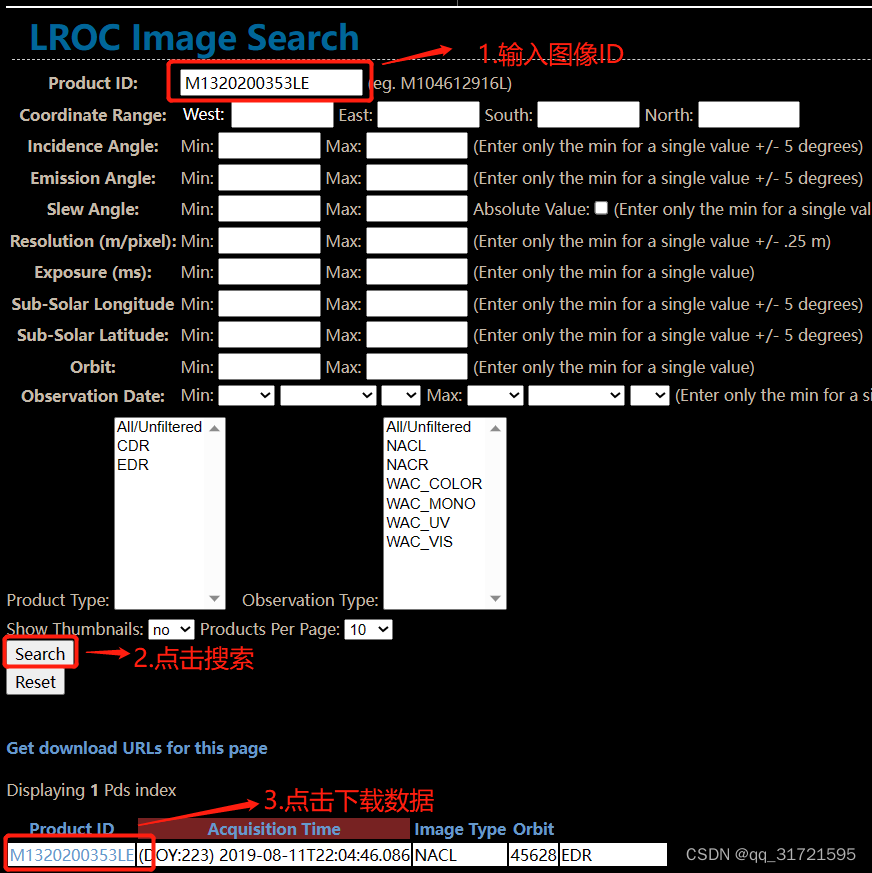
打开第一个网址后如图所示,可根据NAC的(轨道号、相机角度、入射角和发射角、分辨率和图像ID)查询数据,Product ID(eg.M1172873803LE,M1172873803RE)下载对应的EDR数据。
2.利用ISIS处理LROC-NAC(EDR)数据
我们使用美国地质调查局United States Geological Survey (USGS)开发的成像仪和光谱仪集成软件Integrated Software for Imagers and Spectrometers (ISIS)处理数据。
ISIS的下载安装参考:深空探测处理软件USGS-ISIS的下载安装_qq_31721595的博客-CSDN博客
2.1 将NAC-EDR转换为ISIS的cube格式
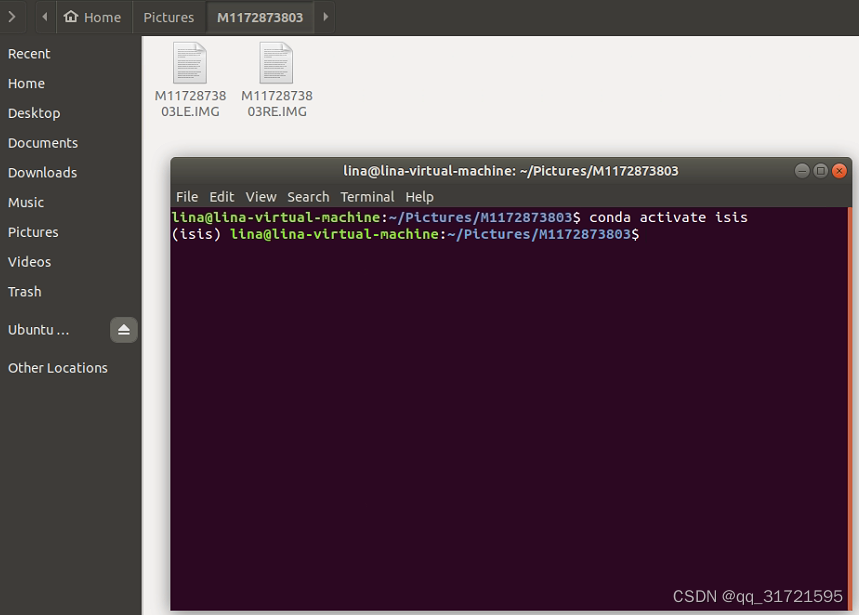
(1)首先找到你所下载的数据文件的位置,然后打开终端,利用conda进入ISIS,如图:
(2)将M1172873803LE.IMG,M1172873803RE.IMG转换为ISIS的cube格式,命令如下:
lronac2isis from=M1172873803LE.IMG to=M1172873803L.raw.cub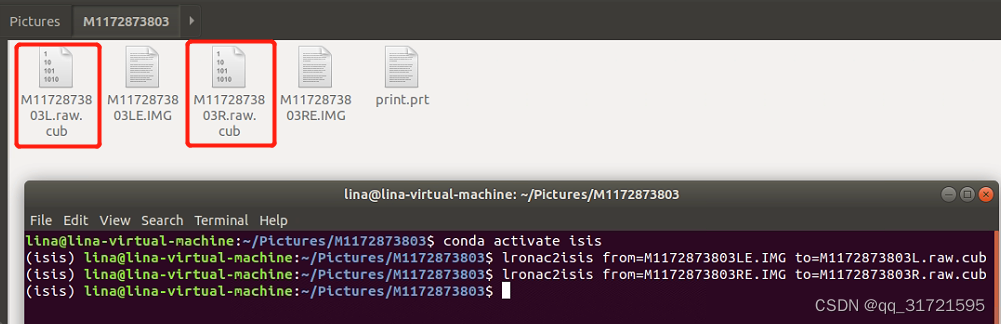
2.2 附加相机位置信息
ISIS使用Navigation and Ancillary Information Facility SPICE system在观测过程中确定相机位置,以便将图像正确投影到地面上。该步只要在光度校正前执行即可,开始时执行此步骤便于立即查询图像的几何信息,或在进行额外处理前确定是否有所需要的kernels可用。命令如下:
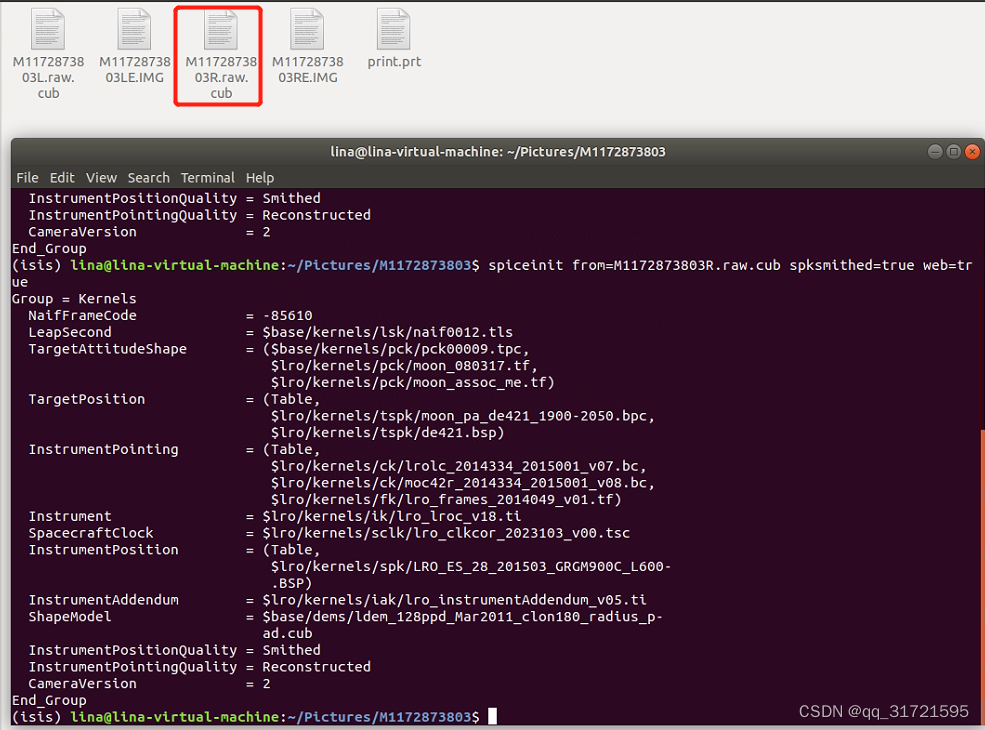
spiceinit from=M1172873803L.raw.cub spksmithed=true web=truespiceinit from=M1172873803R.raw.cub spksmithed=true web=true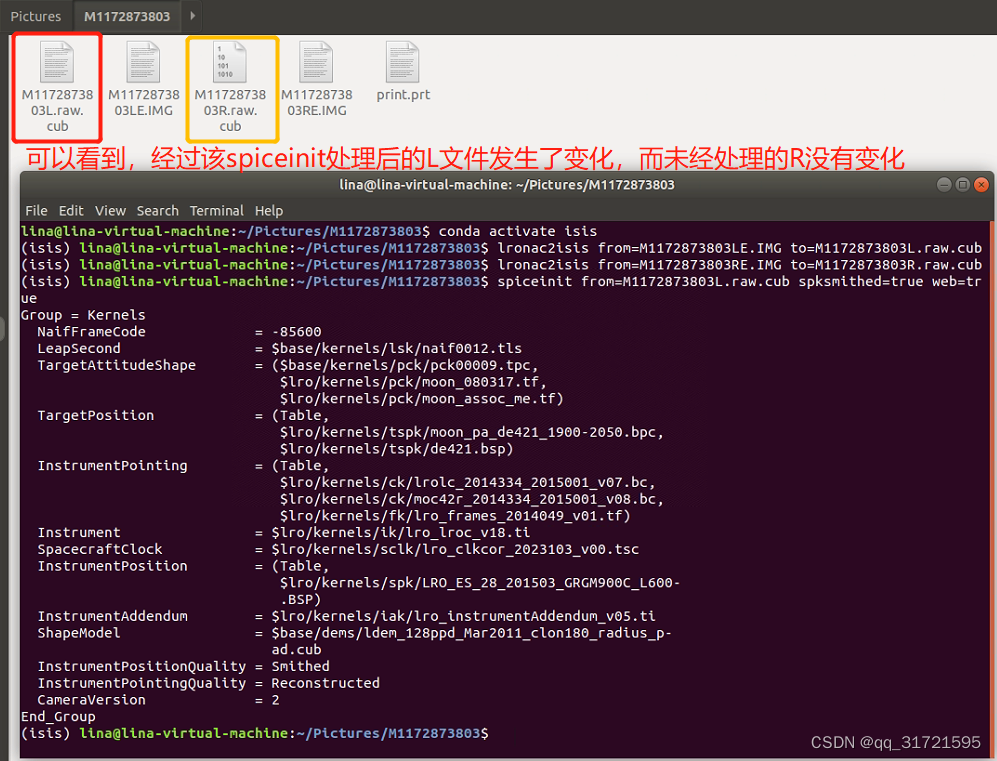
对M1172873803R做同样处理,如图:
2.3 辐射校正
lronaccal from=M1172873803L.raw.cub to=M1172873803L.cal.cublronaccal from=M1172873803R.raw.cub to=M1172873803R.cal.cub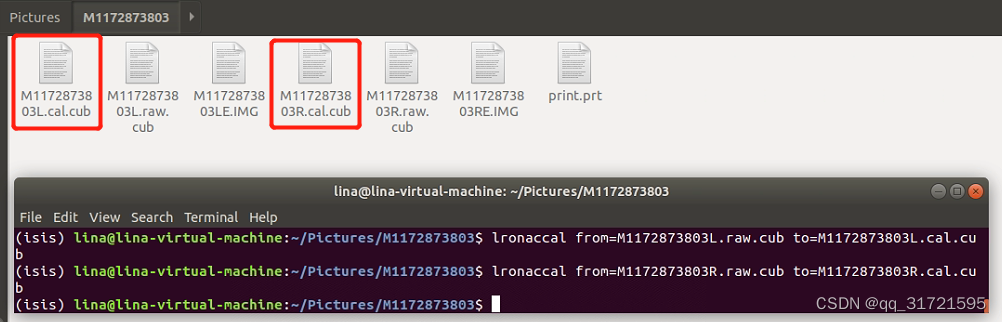
2.4 回波校正
lronacecho from=M1172873803L.cal.cub to=M1172873803L.echo.cublronacecho from=M1172873803R.cal.cub to=M1172873803R.echo.cub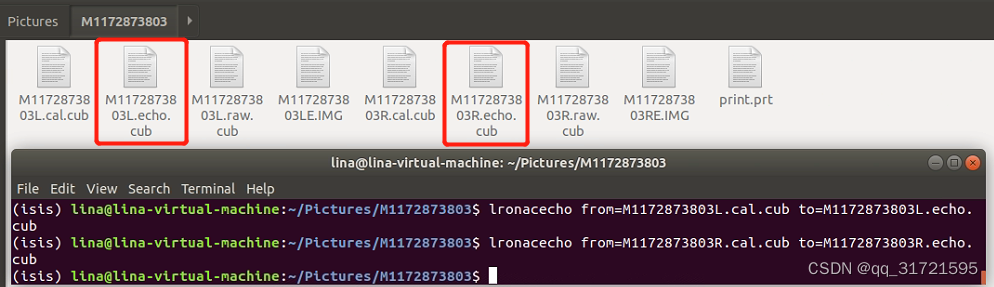
注:回波校正后会生成伪影,利用trim去除。
如果对图像求和(在EDR标签中,查找“CROSSTRACK_SUMMING = 2”,或者检查图像宽度是否为2532像素),将这些数字除以2:修剪量应该是23和13 :
NAC-L:
trim from=M1172873803L.echo.cub to=M1172873803L.tr.cub left=46 right=26NAC-R:
trim from=M1172873803R.echo.cub to=M1172873803R.tr.cub left=26 right=46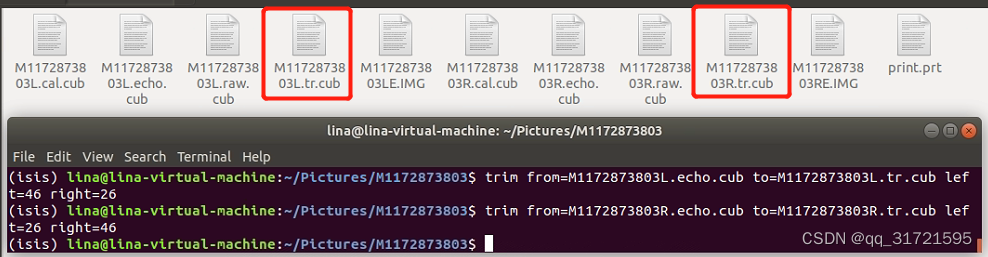
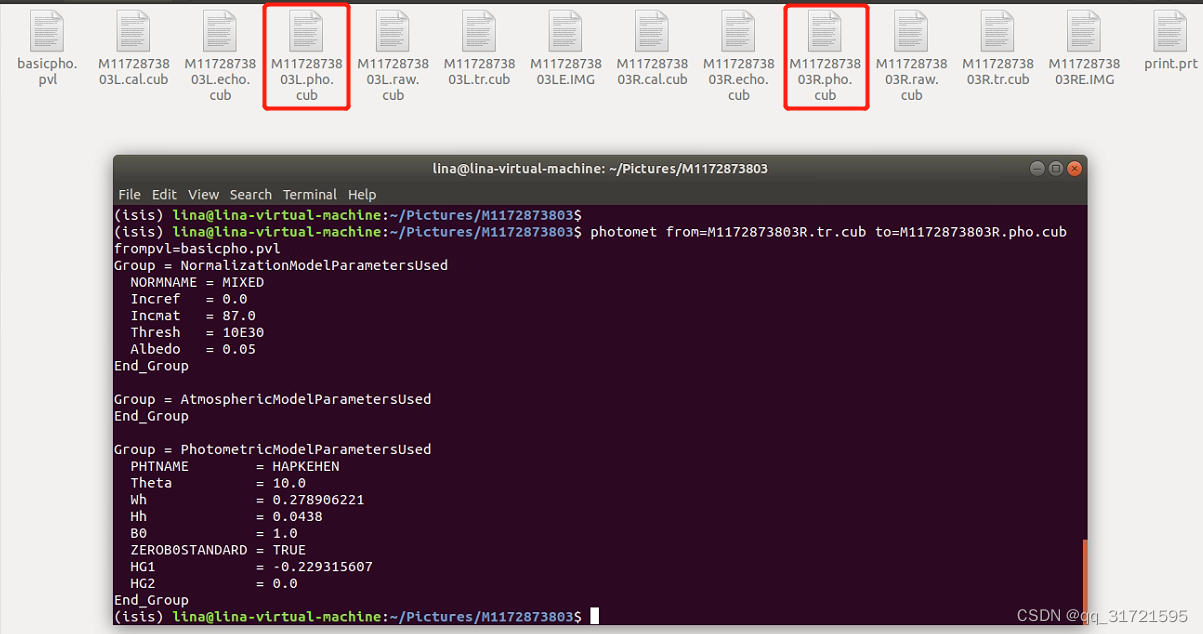
2.5 光度校正(可选)
这一步不是必须的
photomet from=M1172873803L.tr.cub to=M1172873803L.pho.cub frompvl=basicpho.pvlphotomet from=M1172873803R.tr.cub to=M1172873803R.pho.cub frompvl=basicpho.pvl不过,若要进行光度校正首先需要新建一个basicpho.pvl文件,该文件内容为:
Object = NormalizationModel
Group = Algorithm
Name = Mixed
Incmat=87.0
Albedo=0.05
Incref=0.0
Thresh=10E30
EndGroup
EndObject
Object = PhotometricModel
Group = Algorithm
Name = HapkeHen
Wh=0.278906221
Hh=0.0438
B0=1.0
Theta=10.0
HG1=-0.229315607
HG2=0.0
EndGroup
EndObject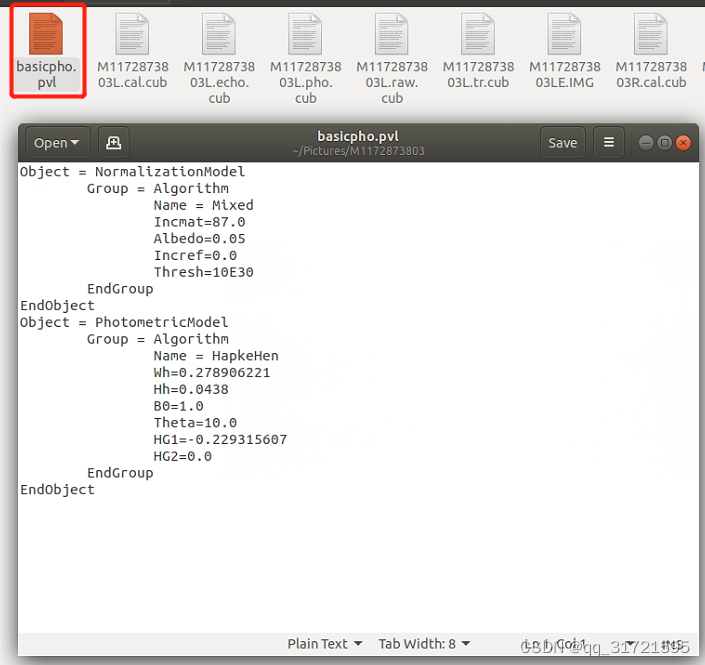
2.6 创建一个地图文件mosaic.map
首先将所有想要组合成一个mosaic的图像的路径放入自建的文本文件"mosaic_level_1.lis"中,如图:

然后,利用mosrange命令 生成地图文件。此外,如果知道感兴趣区域的确切边界或中心点,还可用maptemplate,但这里用的mosrange命令,使用的是等矩形投影equirectangular,若纬度在70°以上或靠近极点的区域,利用polar stereographic。
注:因为所有发布的LRO产品使用的都是0-360的经度值,而ESRI程序(如ArcMap)经度值在-180-180,所以若要在ArcMap中使用地图投影产品,还需在后面添加命令,londom=180。
mosrange fromlist=mosaic_level_1.lis to=mosaic.map projection=equirectangular londom=180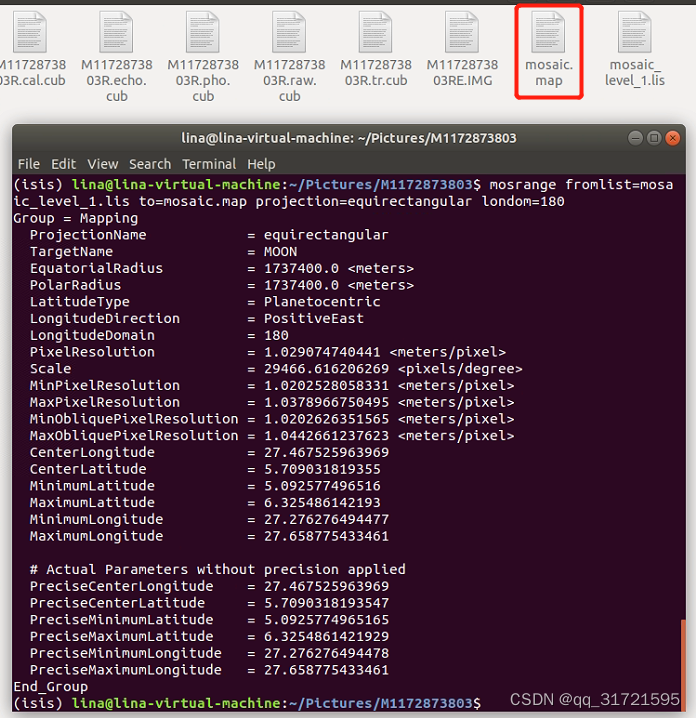
2.7 地图投影
cam2map from=M1172873803L.pho.cub to=M1172873803L.map.cub map=mosaic.map warpalgorithm=forwardpatch patchsize=50cam2map from=M1172873803R.pho.cub to=M1172873803R.map.cub map=mosaic.map warpalgorithm=forwardpatch patchsize=50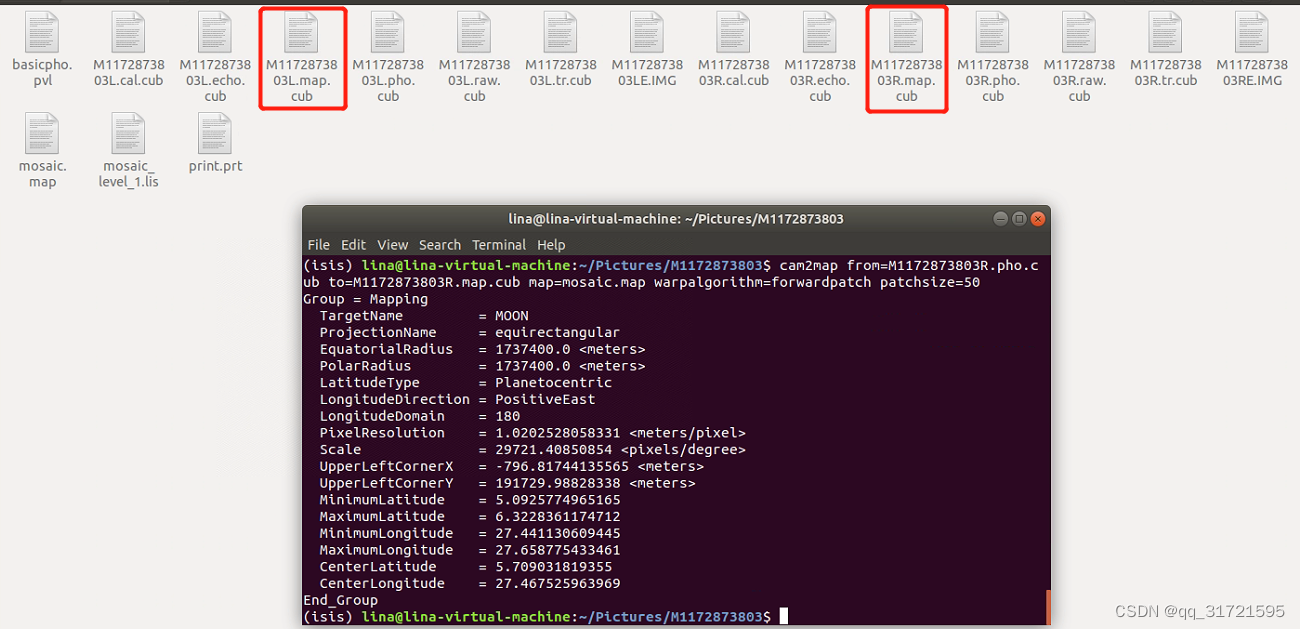
2.8 镶嵌
ls M1172873803?.map.cub > M1172873803.lis
automos fromlist=M1172873803.lis mos=M1172873803.mosaic.cub运行完第一句命令后,生成M1172873803.lis文件,如图:
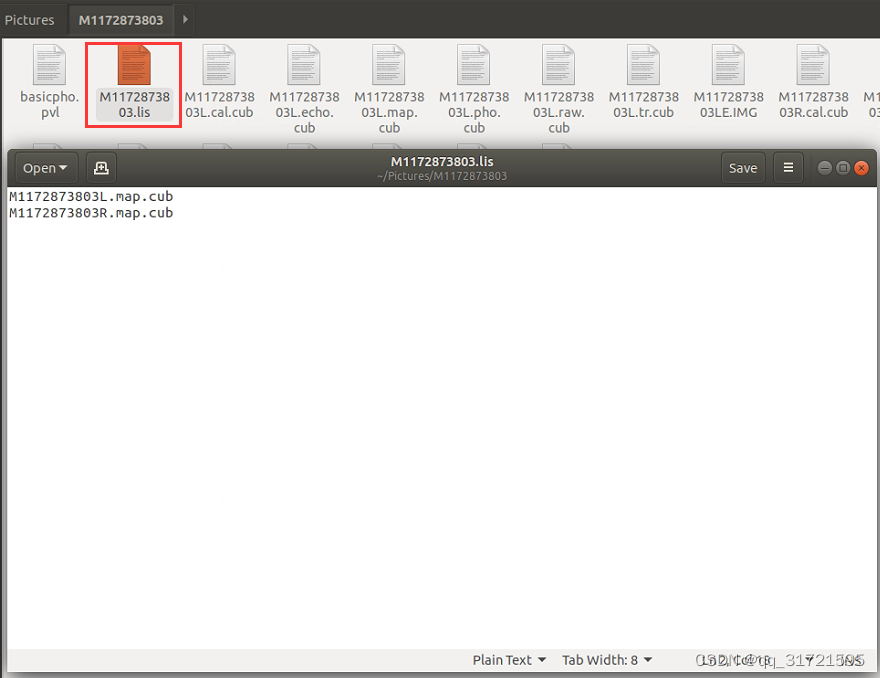
然后运行第二条命令,但是报错了,目前还不清楚是什么原因,如图:

但我们可以将得到的 M1172873803L.map.cub 和 M1172873803R.map.cub 放在ArcMap中进行镶嵌,见第3节。
2.9 配准(可选)
有时一对NAC图像可能存在明显的偏移,需要使用corge来对齐两个图像。
map2map from=M1172873803R.map.cub to=M1172873803R.Lbounds.cub map=M1172873803L.map.cub matchmap=true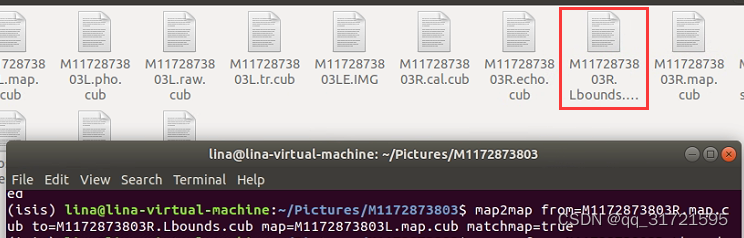
下一步,首先需要创建nac_pair_align.def文件,内容如下:
Object = AutoRegistration
Group = Algorithm
Name = MaximumCorrelation
Tolerance = 0.7
SubpixelAccuracy = True
End_Group
Group = PatternChip
Samples = 20
Lines = 20
End_Group
# If you determine that the vertical or horizontal offset is >50 pixels, adjust the SearchChip
# size to be at least `20+offset*2`, where 20 is the PatternChip size.
Group = SearchChip
Samples = 120
Lines = 120
End_Group
Group = SurfaceModel
DistanceTolerance = 1.5
WindowSize = 5
End_Group
End_Object
End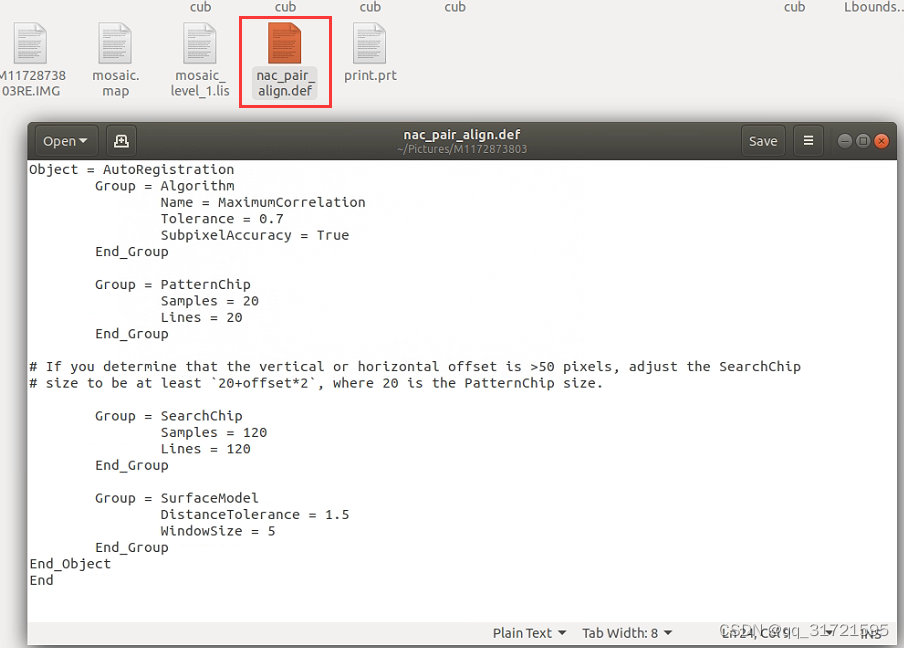
然后,运行如下命令,会得到 SampleAverage 和 LineAverage,用于下一步translate命令 :
coreg from=M1172873803R.Lbounds.cub match=M1172873803L.map.cub deffile=nac_pair_align.def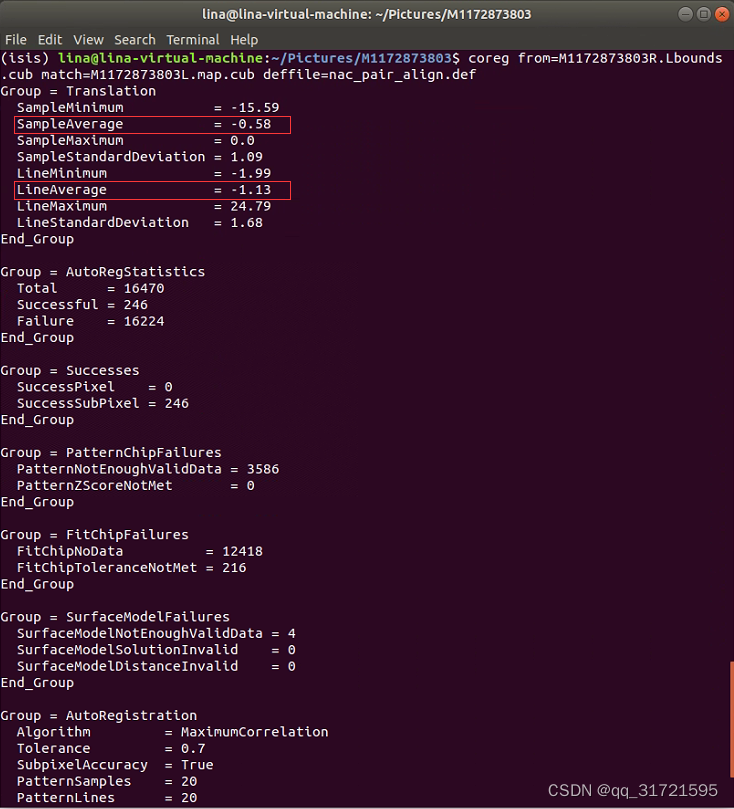
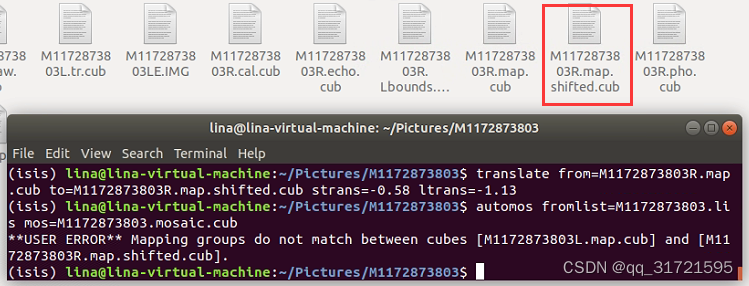
利用translate命令纠正偏移, 将$sampleaverage 和 $lineaverage换为上图corge输出的值,-0.58和-1.13.
translate from=M1172873803R.map.cub to=M1172873803R.map.shifted.cub strans=$sampleaverage ltrans=$lineaverage然后再对M1172873803L.map.cub、M1172873803R.map.shifted.cub运行2.8中的镶嵌命令,但依然报错,所以我直接跳过2.8、2.9的命令,利用ArcMap拼接影像。
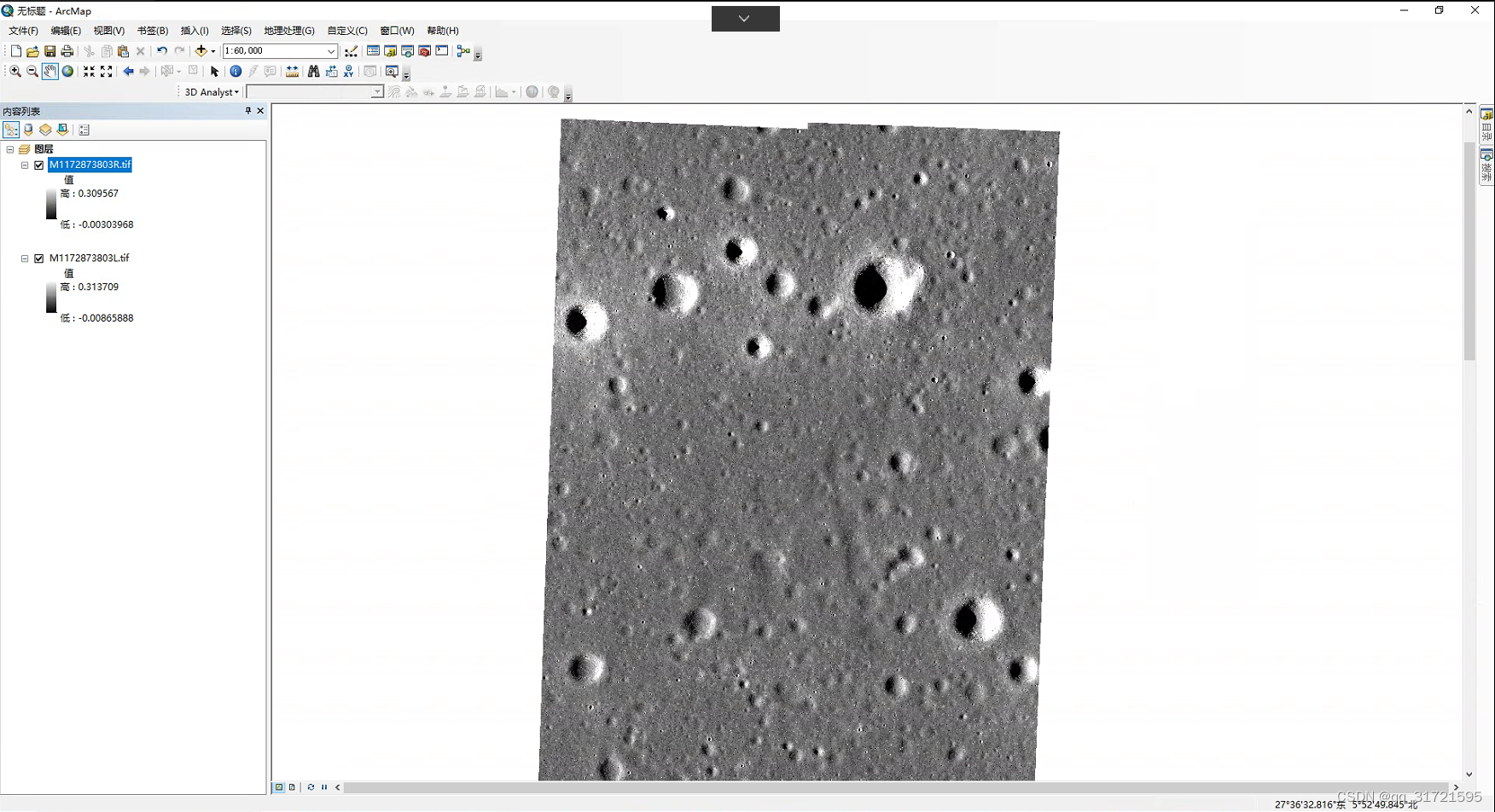
最后需要的就是这两个数据文件:
3.利用GDAL转换为地理参考格式(.tif)
因为未在虚拟机中安装GDAL,我在本机电脑的Pycharm中利用Python进行转换,前提是也需要安装gdal包,或从osgeo中导入gdal包。
from osgeo import gdal
cubdata = r"D:\Moon_Data\processedData\M1096293859L.map.cub" # 经上面步骤得到的.cub文件路径
tifdata = r"D:\Moon_Data\processedData\M1096293859L.tif" # .tif文件路径
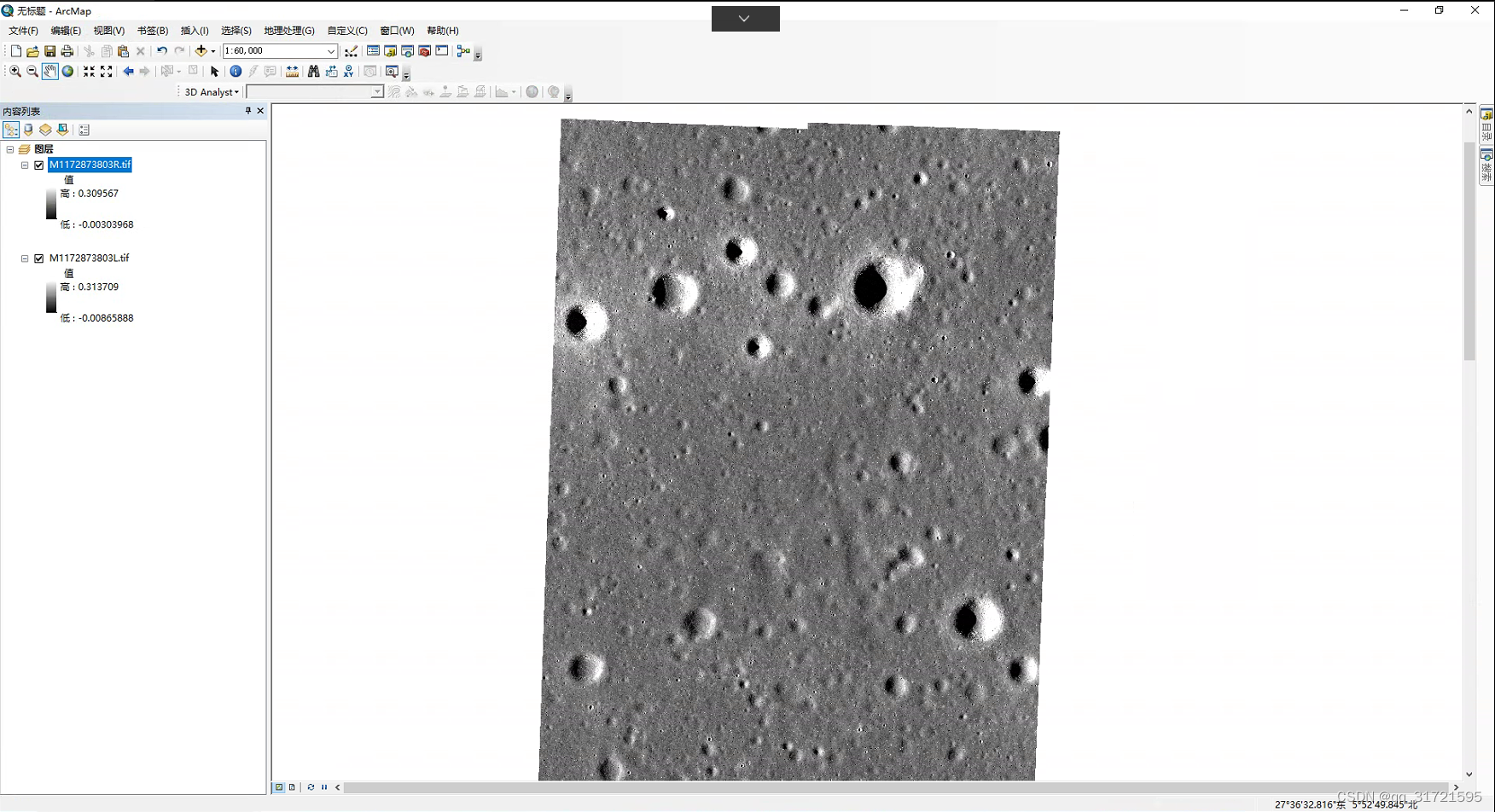
gdal.Translate(tifdata, cubdata)最终得到下图的.tif文件,并在ArcMap中打开它们,可以看到这些.tif图像带有投影信息了:
参考资料
为ISIS处理LROC-NAC的官方资料,上述过程均参考这些资料,详细步骤请参考如下资料!
- 链接:https://pan.baidu.com/s/1EwGj3xdbeES6-9LQVmh-2g
提取码:6e8i - 链接:https://pan.baidu.com/s/1cyIBdrzbh4wBuKh15gHP9A
提取码:o7fz

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)