三维空间点拟合圆原理及C++实现
已知三维空间离散点坐标(xi, yi, zi),构建一个空间圆使得空间点尽可能靠近拟合的空间圆。首先,所有离散点尽可能在一个平面上,平面方程可表示为(1)写成矩阵形式为,,式中,,(...
已知三维空间离散点坐标(xi, yi, zi),构建一个空间圆使得空间点尽可能靠近拟合的空间圆。
首先,所有离散点尽可能在一个平面上,平面方程可表示为
(1)
写成矩阵形式为,
,式中
,
,
(2)
这是一个超定方程求解,根据最小二乘法,可以求出,即平面的法向向量。
假设所有离散点都在圆上,那么任意两点的连线的中垂线必过圆心。设圆心C(x0,y0,z0),取两个点P1(x1,y1,z1)与P2(x2,y2,z2),则P1和P2连线的向量vector1表示为(x2-x1,y2-y1,z2-z1),P1和P2连线的中点坐标P12为
圆心C与P12连线向量vector2为。要想P1与P2在圆上,则满足vector1*vecotor2=0,即
整理一下,有
,
式中 ,
所有点都在圆上,则有
 (3)
(3)
写成矩阵形式 ,
式中 ,
, ,
,
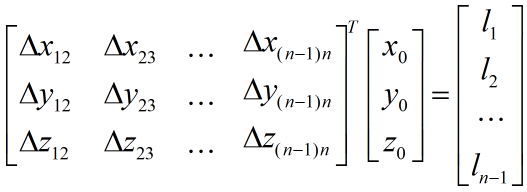
上述方程亦为超定方程,变换成适定形式为
![]() (4)
(4)
由于圆心C必在前述控制的平面内,因此满足, 即
![]() (5)
(5)
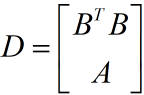
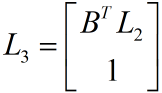
A为平面的法向量,通过 (6)已求出,因而可将式(4)和式(5)合并,写成一个扩展式进行求解
![]() ,式中
,式中
 ,
,
则求解圆心坐标
圆的半径可由所有点到圆心的距离的平均值确定:

C++代码实现如下:
vector<float> FitCircle(std::vector<vector<float>> pts)
{
vector<float> circle;
int num = pts.size();
int dim = 3;
Eigen::MatrixXd M(num, dim);
for (int i = 0; i < num; i++)
{
for (int j = 0; j < dim; j++)
{
M(i, j) = pts[i][j];
}
}
Eigen::MatrixXd L1 = Eigen::MatrixXd::Ones(num, 1);
//式(6)
Eigen::MatrixXd A = (M.transpose()*M).inverse()*M.transpose()*L1;
Eigen::MatrixXd B = Eigen::MatrixXd::Zero(num - 1, 3);
for (int i = 0; i < num - 1; i++)
{
B.row(i) = M.row(i + 1) - M.row(i);
}
Eigen::MatrixXd L2 = Eigen::MatrixXd::Zero(num - 1, 1);
for (int i = 0; i < num - 1; i++)
{
L2(i) = (M(i + 1, 0)*M(i + 1, 0) + M(i + 1, 1)*M(i + 1, 1) + M(i + 1, 2)*M(i + 1, 2)
- (M(i, 0)*M(i, 0) + M(i, 1)*M(i, 1) + M(i, 2)*M(i, 2))) / 2.0;
}
Eigen::MatrixXd D;
//!!!矩阵合并前需要将合并后的矩阵 resize
D.resize(4, 3);
D << B.transpose()*B,
A.transpose();
Eigen::MatrixXd L3;
Eigen::MatrixXd One31 = Eigen::MatrixXd::Ones(3, 1);
L3.resize(4, 1);
L3 << B.transpose()*L2,
One31;
//式(7)
Eigen::MatrixXd C = (D.transpose()*D).inverse()*D.transpose() * L3;
//式(8)
double radius = 0;
for (int i = 0; i < num; i++)
{
Eigen::MatrixXd tmp = M.row(i) - C.transpose();
radius = radius + sqrt(tmp(0)*tmp(0) + tmp(1)*tmp(1) + tmp(2)*tmp(2));
}
radius = radius / num;
circle.push_back(C(0));
circle.push_back(C(1));
circle.push_back(C(2));
circle.push_back(A(0));
circle.push_back(A(1));
circle.push_back(A(2));
circle.push_back(radius);
return circle;
}

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)