仿真能力建设,Worldsim与Logsim
Worldsim是由人为预设的道路和障碍物构成的场景, 可以作为单元测试简单高效的测试自动驾驶车辆,而Logsim是由路测数据提取的场景,真实反映了实际交通环境中复杂多变的障碍物和交通状况,其场景相对固定。
先介绍一下,Worldsim和Logsim,他们是干嘛的,含义就看字面意思,Logsim就是提取log来做仿真。Worldsim是由人为预设的道路和障碍物构成的场景,可以作为单元测试简单高效的测试自动驾驶车辆,而Logsim是由路测数据提取的场景,真实反映了实际交通环境中复杂多变的障碍物和交通状况,其场景相对固定。
当前大家在做的大多是Worldsim,无论是采用商业软件还是基于开源软件二次开发的软件,只能做一些合规性仿真测试,都是提前预设好的场景。这种方法只能做合规性测试,就像大家在驾校里考试科目一样,大部分人都提前练习了好久,基本都能通过,不能通过的再多练习。驾校里出来的学员上路还是有很多问题,还得继续练习才能成为老司机。大家在考试前都会做自己做错的题,这就是Logsim的意义了。将自己在道路上发生的有问题的场景,在仿真环境下复现,才是最有效的最直接的解决在路测中遇到的问题,还可以在此基础上对采集的数据进行衍生,生成更有意义的场景。当前的重点应该解决从log到场景的还原,然后是再次衍生。国内有公司已经完成了这个工作,但是更多的公司是没有建立这种能力。几个关键的步骤是,第一步:采集数据;第二步,解析数据;第三步,初始化场景中交通参与者状态;第四步,运行场景…后面还没想好,前面这几步的工作量就很大。
基于有效场景的测试才会变得更有意义,如何在海量的场景寻找有意义的场景是我们需要考虑的,在路测中很多场景是无效的,怎么寻找安全紧要场景就成了大家关心的话题。要寻找安全紧要场景的前提是有场景或者场景库,那就离不开场景生成,在一个公开报告中提到了生成场景的三种方法:
- 数据驱动;
- 对抗生成;
- 基于知识生成。
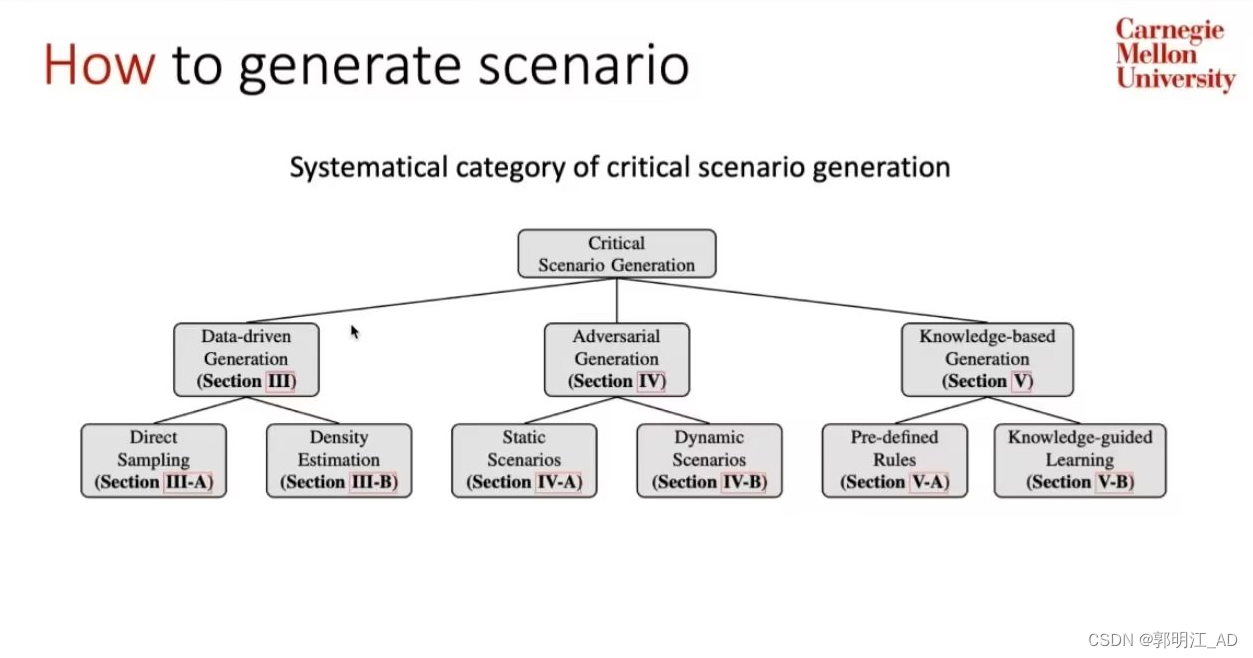
上面的三种方法里仍有worldsim 和logsim的影子,数据驱动是不是采集的log呢,来源于log高于log,基于先验知识的场景生成是不是有worldsim的味道呢。从目前来看,worldsim 和logsim都无法解决安全紧要场景问题,原因是不知道有多少corner case无法穷举,目前大多数的方法本质都是采样,以有限去逼近无穷,看起来是不明智的选择。当前也没有别的方案,Worldsim与Logsim还得搞,积累了足够多场景的数据,可以数据驱动,可以对抗生成,而且有一定的作用,假设有真实情况100万个corner case,一个企业找出50万个的corner case和另一个找出1万个corner case,他们做出来的自动驾驶系统鲁棒性肯定不一样,所以还得继续干,而且把当前的方案做好,为下一步做好准备。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)