双目视觉测距原理及应用
目前大部分双目视觉产品都是求解深度图用于slam建图导航,立体匹配及三维重建等算法算力要求高,在一些只需要简单测距的场景并不适用,如无人机定高定点悬浮,目前市场上常用的测距有激光测距、超声波测距等等,而武汉凌启科技有限公司利用双目视觉像素尺度原理开发了一款光流测距一体模块LQ-S01,如图3,如下图2,相机在位置1,其视场角为β,距离地面Z,拍摄到的地面宽度为L,图片像素为W*H,场景中有一点P,
双目视觉测距原理及应用
作者:凌启科技
1 双目视觉测距原理
双目视觉测距原理可分为相似三角形原理和像素尺度原理,前者是目前主流的解释,后者是凌启科技命名的一种解释,具体如下。
1.1 相似三角形原理
目前对双目视觉测距原理的解释是三角形相似原理,如下图1(图片来源链接https://cloud.tencent.com/developer/article/2054308),Or和Ot分别为两个平行放置的相机,B为两个相机光轴的距离,f为镜头焦距,P点为场景中的一个实物点,Z为实物点P到相机的距离。
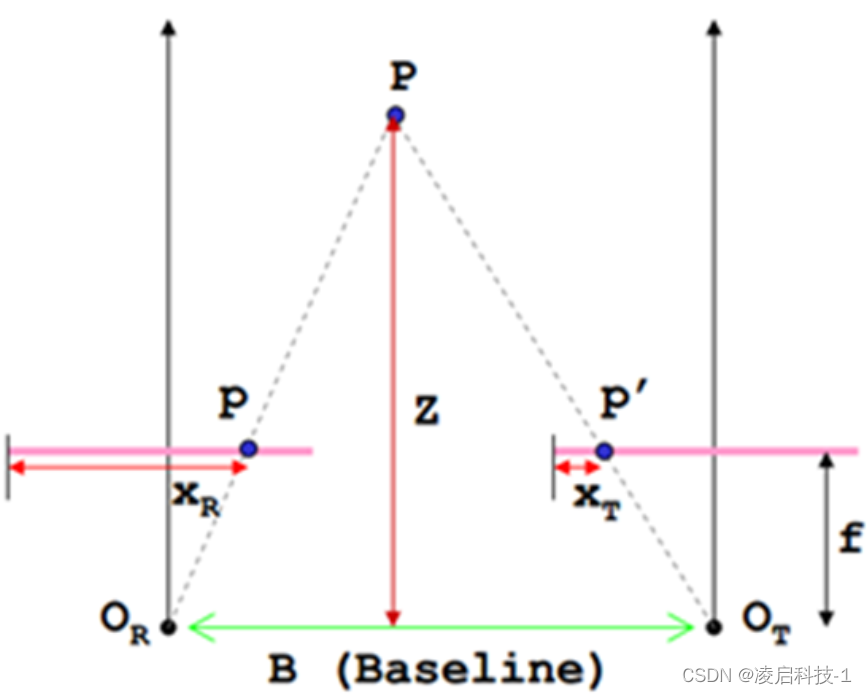
图1
根据相似三角形原理,可得式1,进而可推导出Z的表达式,见式2。
![]() …………………………………………………(式1)
…………………………………………………(式1)
![]() ………………………………………………………(式2)
………………………………………………………(式2)
1.2 像素尺度原理
如下图2,相机在位置1,其视场角为β,距离地面Z,拍摄到的地面宽度为L,图片像素为W*H,场景中有一点P,相机在位置1时P点的x轴像素坐标为X1。
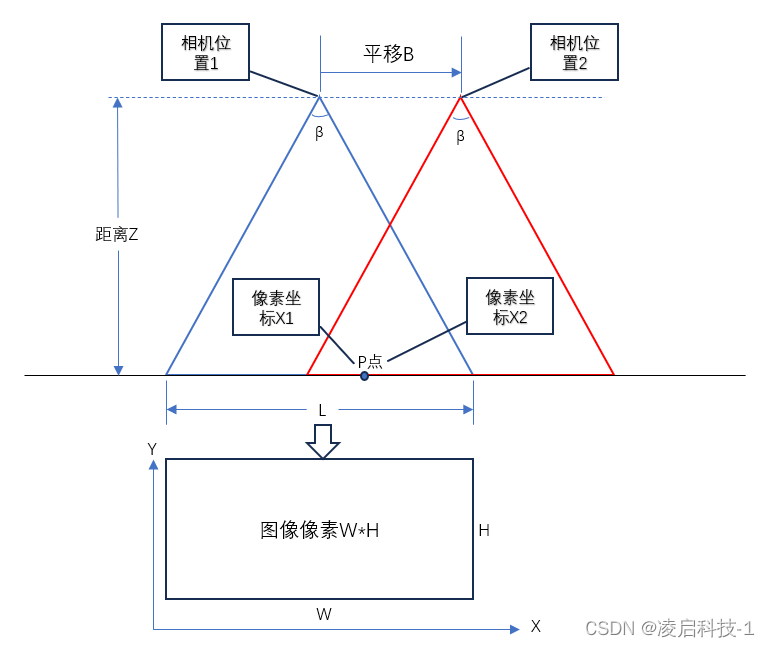
图2
我们可以很容易得到距离Z的表达式见式3,β与镜头有关,为已知项,只要知道L就能求出Z,而L包含了W了像素,只要求出每个像素所代表的距离,就能求出Z。
Z=L/(2tan(β/2))………………………………………………(式3)
现在将相机从左向右移动距离B到位置2,此时P点在图片中的x轴像素坐标为X2,这样,我们就能求出每个像素所代表的距离t,见式4,
t=B/(X1-X2) ………………………………………………(式4)
所以L=Wt,于是便可求得Z,见式5
Z=WB/(2tan(β/2)(X1-X2)) ………………………………………(式5)
假如我们直接在位置2放置一个与相机1相同参数的相机,就可利用双目相机测距。
2 基于像素尺度原理的自研产品
利用像素尺度原理进行测距,最重要的就是需要提供一个参照距离,以求得每个像素所代表的距离。双目视觉中,两个相机基线长度的意义就是作为参照距离,在单目视觉中,假如场景中也能找到一个已知的参照距离,则也能求得最终的距离。
目前大部分双目视觉产品都是求解深度图用于slam建图导航,立体匹配及三维重建等算法算力要求高,在一些只需要简单测距的场景并不适用,如无人机定高定点悬浮,目前市场上常用的测距有激光测距、超声波测距等等,而武汉凌启科技有限公司利用双目视觉像素尺度原理开发了一款光流测距一体模块LQ-S01,如图3,
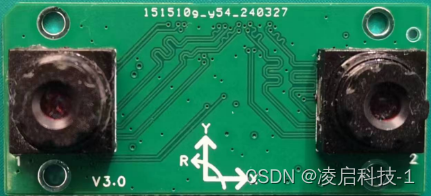
图3
该模块具备测距及光流功能,让无人机轻松实现定高定点悬浮。针对双目相机标定难的问题,凌启科技自研了相关算法,可轻松实现相机标定,该技术正在申请专利。另外,凌启科技还自研了光流算法,直接输出物理值,数据稳定可靠,在不加任何滤波的情况下,无人机仍能稳定悬浮,飞行视频可在B站搜索凌启科技观看。该产品已上线某宝,欢迎感兴趣的同学一起来讨论,关于光流模块的使用,可阅读另一篇文章《光流模块在无人机中的应用》。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 41
41 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)