Zernike 多项式在圆形、六边形、椭圆形、矩形或环形瞳孔上应用(Matlab代码实现)
本文可以显示 Zernike 多项式在圆形、六边形、椭圆形、矩形或环形瞳孔上,也可以将表面数据拟合到这些瞳孔形状上。有关非圆形瞳孔形状的 Zernike 多项式的描述。可以指定在 j-顺序或 (n,m) 表示法中使用的 Zernikes,Mahajan/Noll 或 Born&Wolf 归一化,条纹子集,以及使用哪种符号约定。还可以指定一个掩膜来选择用于拟合 Zernike 多项式的表面数据子集。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
本文可以显示 Zernike 多项式在圆形、六边形、椭圆形、矩形或环形瞳孔上,也可以将表面数据拟合到这些瞳孔形状上。有关非圆形瞳孔形状的 Zernike 多项式的描述。
可以指定在 j-顺序或 (n,m) 表示法中使用的 Zernikes,Mahajan/Noll 或 Born&Wolf 归一化,条纹子集,以及使用哪种符号约定。还可以指定一个掩膜来选择用于拟合 Zernike 多项式的表面数据子集。最小二乘拟合系数将被计算。如果未指定表面数据,则该函数将显示在指定的瞳孔形状上指定的 Zernike 多项式之和。可以指定用于拟合的像素单位中单位圆的中心和半径。
摘要:"波前分析中的正交多项式:解析解" 是一个被广泛使用的概念,因为它们在圆形瞳孔上的正交性以及对经典像差的平衡表示。在最近的论文中,我们推导出了在六边形瞳孔上正交的闭合形式多项式,比如一个大镜子的六边形分段。我们将我们的工作扩展到椭圆形、矩形和正方形瞳孔。利用圆形多项式作为基函数,在这些瞳孔上进行正交化,我们推导出了闭合形式的正交多项式。这些多项式是独特的,因为它们不仅在这些瞳孔上是正交的,而且像 Zernike 圆形多项式一样,也表示平衡的经典像差。这些多项式以圆形多项式、极坐标和笛卡尔坐标的形式给出。还得到了给定瞳孔的正交系数与相应的 Zernike 系数之间的关系。一个一维缝孔瞳孔的正交多项式可以作为矩形瞳孔的一个极限情况获得。
Zernike多项式作为描述波前像差的重要数学工具,在光学系统分析中具有核心地位。其在圆形瞳孔中的应用已高度标准化,但随着光学系统复杂度的提升,针对非圆形瞳孔(如六边形、椭圆形、矩形、环形)的扩展研究逐渐成为焦点。以下从不同瞳孔形状的应用场景、方法创新及挑战进行系统阐述:
一、圆形瞳孔的传统应用
Zernike多项式在圆形瞳孔上的正交性和完备性使其成为波前分析的黄金标准:
-
数学定义与正交性
Zernike多项式由归一化因子、径向分量(阶数n)和角向分量(频率m)组成,以极坐标(ρ,θ)表示,其中ρ∈[0,1]为归一化半径。其在单位圆上的正交性确保各阶像差系数相互独立,便于分离低阶(如散焦、散光)和高阶像差(如球差、彗差)。 -
临床应用与标准化
在眼科领域,Zernike多项式通过ANSI Z80.28-2017标准实现像差量化,可直接计算屈光矫正值(球镜S和柱镜C),为个性化屈光手术提供依据。例如,低阶系数对应近视、远视和散光,而高阶系数(如c04)描述复杂像差。 -
技术挑战
非连续或非均匀采样的圆形数据可能导致正交性近似失效,需通过插值或拟合优化。
二、六边形瞳孔的适配方法
六边形瞳孔常见于天文望远镜(如Keck望远镜)和激光系统,其对称性与圆形差异显著:
-
正交化扩展
- Gram-Schmidt正交化:Virendra等人(2006)通过Gram-Schmidt方法对传统Zernike多项式进行系统正交化,生成六边形专用基函数,保留正交性并提升拟合精度。
- 分段分析技术:Pierrejanin-Potiron等人(2018)提出将六边形分解为多个三角形或菱形子区域,分别应用Zernike拟合后合成全局解,但计算复杂度较高。
-
应用案例
- 天文观测:大型拼接式望远镜通过六边形子镜降低装调难度,扩展Zernike多项式用于像差校正与共相检测。
- 激光光束控制:六边形微透镜阵列中,修正后的Zernike基函数用于波前整形,改善光束均匀性。
三、椭圆形瞳孔的解决方案
椭圆形瞳孔在离轴成像和生物医学光学中常见,需处理非对称性:
-
坐标变换法
- 几何拉伸:将椭圆沿短轴拉伸为圆,应用传统Zernike多项式后逆变换还原,但会引入波前RMS值失真。
- 椭圆坐标系转换:直接采用椭圆坐标系(ρ′,θ′)(ρ′,θ′)重构Zernike表达式,保持像差物理意义。
-
专用正交多项式
Mahajan(2007)基于Zernike圆多项式的正交性,推导椭圆域上的闭式解,通过调整椭圆率参数实现自适应拟合。 -
挑战与误差
- 边界效应:椭圆边缘的高曲率区域易产生拟合误差,需增加高阶项或局部加密采样。
- 离轴像差:离轴时光瞳形状随视场变化,需动态调整椭圆参数或结合视场分区模型。
四、矩形瞳孔的适配技术
矩形瞳孔多见于液晶显示器和光纤耦合系统,其直角边界与圆形差异显著:
-
笛卡尔坐标修正
将Zernike多项式转换为笛卡尔坐标形式,截断非正交项或引入窗函数(如Hann函数)抑制边界振荡。 -
广义Zernike多项式
Broemel等人(2017)提出“条纹Zernike多项式”,通过梯度正交化在方形区域构建新基函数,兼容传统像差命名规则。 -
实际限制
- 边缘不连续性:矩形边界处易产生Gibbs现象,需结合边缘平滑或混合基函数(如Legendre多项式)。
- 计算效率:矩形域正交化需更高阶数,实时应用中常采用GPU加速或稀疏采样。
五、环形瞳孔的专用扩展
环形瞳孔用于激光谐振腔或中心遮挡的光学系统(如LSST望远镜):
-
环域Zernike多项式
Mahajan(1994)提出环形正交基函数,通过引入内径比ϵϵ(内环半径/外环半径)参数化,保留传统Zernike的像差物理意义。例如,环形球差系数与圆形系统存在线性映射关系。 -
实际应用验证
- LSST望远镜:其环形瞳孔导致标准Zernike基不正交,改用环形多项式后,波前控制误差降低30%。
- 渐进多焦镜片(PAL) :Raasch(2011)利用环形Zernike多项式表征镜面曲率梯度,优化光学性能。
-
误差分析
使用传统圆形多项式拟合环形波前时,Seidel系数(如球差、彗差)误差可达20%,需至少9项环形基函数才能收敛。
六、未来研究方向
- 统一框架构建:开发跨形状的广义正交基函数(如Area等人2017年的微分-矩阵融合算法),减少形状特异性适配成本。
- 动态瞳孔处理:结合机器学习实时识别瞳孔形状并切换基函数,提升自适应光学系统响应速度。
- 制造工艺反馈:将非圆Zernike系数与加工参数(如铣削路径)关联,推动光学面形闭环控制。
总结
Zernike多项式通过正交性扩展与方法创新,已逐步突破圆形瞳孔的限制,在六边形、椭圆、矩形及环形系统中展现出强大潜力。然而,不同形状的边界条件与像差特性仍需针对性优化,未来结合计算光学与智能算法有望进一步释放其应用价值。
📚2 运行结果
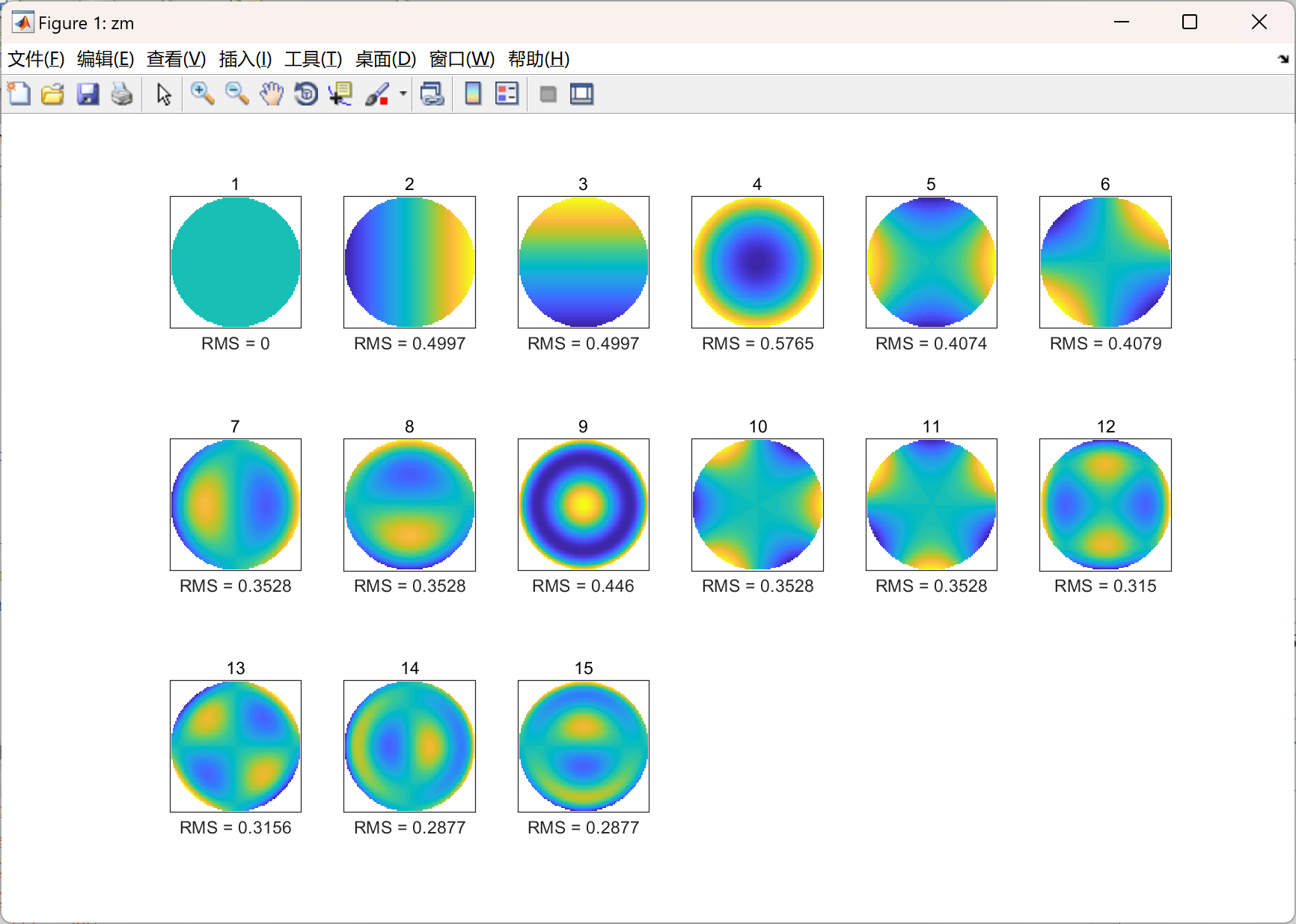
部分代码:
case 1
% only the radiusInPixels has been specified
radiusInPixels = unitCircle(1,1);
case 2
% the centerRow and centerCol have been specified
% so can now calculate the radius in Pixels.
centerRow = unitCircle(1,1);
centerCol = unitCircle(1,2);
% a matrix such that each element (r,c) has the value r-centerRow
rm = (((1:numrows)-centerRow)'*ones(1,numcols)).*mask;
% a matrix such that each element (r,c) has the value c-centerCol
cm = (ones(numrows,1)*((1:numcols)-centerCol)).*mask;
% sqrt(rm.^2 + cm.^2) is a matrix such that (r,c) contains the distance
% of (r,c) to the center (centerRow, centerCol).
radiusInPixels = max(max(sqrt(cm.^2 + rm.^2)));
case 3
% the centerRow, centerCol, radiusInPixels have been specified
centerRow = unitCircle(1,1);
centerCol = unitCircle(1,2);
radiusInPixels = unitCircle(1,3);
otherwise
% error.
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

🌈4 Matlab代码、文章下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 31
31 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)