伪距单点定位推导+DOP值分析(附matlab仿真代码)
伪距单点定位公式推导、DOP值分析与matlab仿真分析
一、伪距单点定位介绍
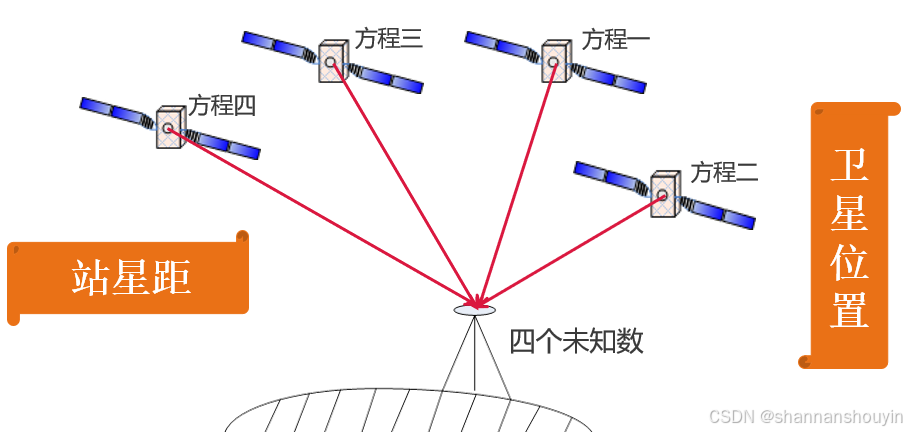
伪距单点定位是卫星导航定位系统中一种简单直接的定位方式。利用卫星发射的测距码信号,接收机通过测量信号到达的传播时间乘以光速得到伪距观测值。由于卫星钟、接收机钟的误差以及信号在电离层、对流层中的延迟等影响,该距离不等于卫星到接收机的真实几何距离,故称为伪距。根据卫星星历以及一台 GNSS 接收机在某一时刻测得四颗以上卫星的伪距及已知的卫星位置,采用空间后方交会的方法求定接收机天线所在点的三维坐标,如图1所示。
伪距观测方程含有四个未知量,分别是接收机位置三维坐标以及接收机钟差。由于伪距观测方程为非线性方程,通常需要对其通过泰勒级数展开进行线性化,然后在有n≥4颗可见卫星,或者累计可见卫星n≥4的条件下,根据最小二乘法进行求解。一般通过不断迭代,直至坐标变化值小于阈值,得到接收机的精确坐标,后续将对伪距单点定位进行详细的公式推导。
伪距单点定位的优点是定位速度快,无多值性问题,一台接收机即可完成独立定位,外业观测组织方便,数据处理简单,还可作为载波相位测量中解算整周模糊度的辅助资料;缺点是精度不高,一般只能达到十几米或几十米甚至更差的精度。其常用于对定位精度要求不高的场景,如普通的导航应用,为用户提供大致的位置信息。在一些需要快速获取位置但精度要求相对较低的领域,如车辆导航、个人位置服务等方面有广泛应用。也可作为其他高精度定位方法的初始定位或辅助定位手段。
二、伪距观测模型建立
在已知信号从卫星发出的时刻和被接收机接收的时刻,以及信号传播速度的情况下,可列出如下基本伪距方程:
然而在实际测量中,和
存在误差,故
并非卫星与接收机之间的真实几何距离,故称为伪距。假设卫星和接收机之间的真实几何距离为
,接收机位置矢量为
,卫星位置矢量为
接收机钟差为
,卫星的钟差为
,
和
分别为电离层和对流层延时,其他误差为
,有以下方程:
由(1)(2)(3)联立得:
式(4)即为伪距测量的完整观测方程。
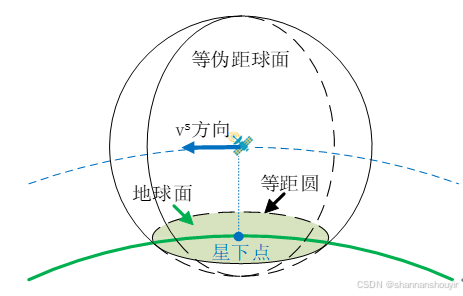
在三维空间内,以卫星为原点,卫星到地面接收机的距离为半径构成的球面上处处伪距值相等,此球面称为等伪距球面,其与地球面相交可获得等伪距圆。如图2所示。
在时刻,设卫星位置为
,接收机位置为
,二者相对位置矢量为
,
为接收机的钟差,将伪距观测值、卫星钟差、电离层延迟、对流层延迟等已知信息统一写作
,由(4)式可知,卫星的伪距观测方程可简化为:
对于地面接收机,卫星位置可由星历提供,伪距测量值可由接收机测量获得,此时方程(5)仅存在接收机位置和接收机钟差
四个未知数,可组成解向量
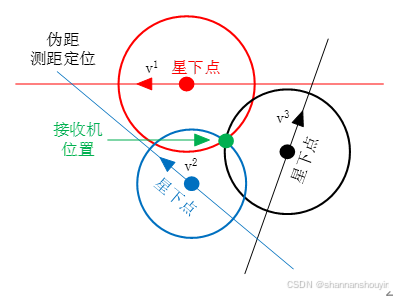
,当可同时观测到三颗卫星时,三颗卫星的地面等伪距圆交汇点即可确定接收机的唯一位置,如图3所示。由于存在四个未知量,在同时可观测四颗及以上卫星时即可求解方程组全部未知数。
在有n≥4颗可见卫星,或者累计可见卫星n≥4的条件下,可列出如下伪距定位方程:
三、伪距定位方程组解算
对于伪距定位方程,假设用户初始坐标为,接收机初始钟差为
,组成初始解为
,可将式(5)进行泰勒一阶展开线性化为下式:
其中,
将式(6)每一个方程进行如式(7)的线性变化,可转化为矩阵表达式:
其中,
其中,为迭代次数,
为第
次迭代解算
的估计值,
为接收机接收卫星信号的伪距值与第
次迭代伪距值的差值向量,
为雅可比矩阵,由式(8)可知,其内部参数如下式:
由式(13)可知,矩阵只与各颗卫星相对于接收机的几何位置相关。
对于式(9),可根据最小二乘法原理求解:
关于线性方程组的最小二乘法解算方法可以看博主的另一篇文章:
最小二乘法求解线性方程组推导(行空间、列空间、投影矩阵)-CSDN博客
将解算出的对上一次迭代的估计解
进行修正,则更新后的估计解为
,并带入下一次迭代运算,直到
小于设定的阈值,则退出迭代,将此时的
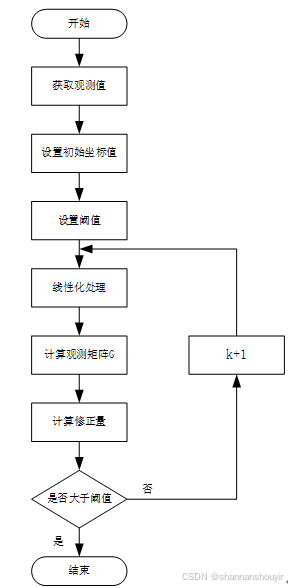
作为最终的用户三维坐标解及接收机的钟差解,算法流程图如图4所示。
四、伪距雅可比矩阵dop值分析
考虑测量误差后的线性化矩阵,将(9)改写为下式:
提去式(15)中的误差项目得下式:
通过最小二乘法求解(15)得:
假设各卫星测量误差为正态分布,且各误差互不相关,则均值,方差
,可得误差的协方差矩阵为:
其中,为对称的权系数矩阵。
由(17)可知,定位误差是测量误差被权系数矩阵放大的结果,而权系数矩阵只与卫星的几何构型分布有关,故定位结果误差的大小取决于测量误差和卫星几何构型分布。精度因子DOP值可看作某历元卫星几何构型对接收机误差的放大系数,在地心地固坐标系(ECEF)下,几何位置精度因子(Geometric Dilution of Precision,GDOP)和空间位置精度因子(Position Dilution of Precision,PDOP)如下式:
在相同观测条件下,DOP值越小则定位的精度越高,DOP值的大小也可以用来评估卫星星座的定位性能。
五、伪距单点定位matlab仿真
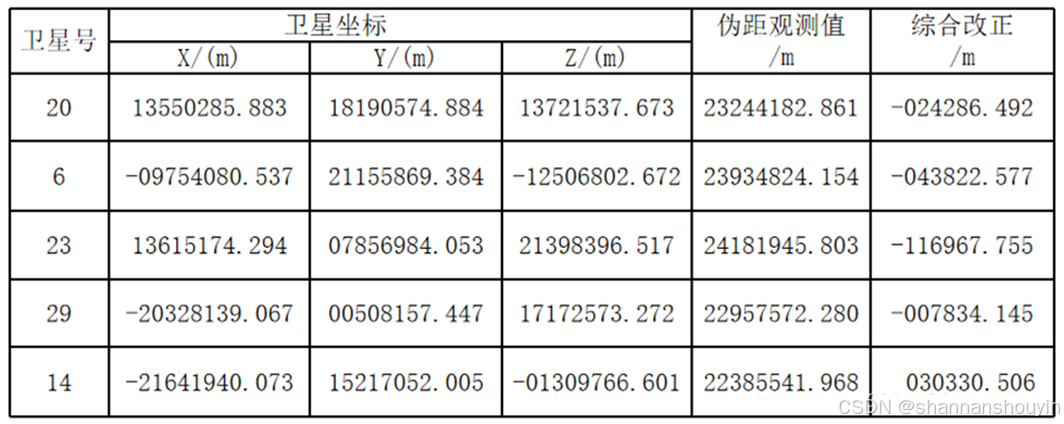
假设在某历元使用一台北斗接收机同时观测5颗卫星,卫星的瞬时空间直角坐标如下表所示,接收机天线概略坐标为(-2441267.123, 4790213.231, 3419994.321),其中综合改正包括卫星钟差、对流层延迟误差、电离层延迟误差等,利用以下实例计算修正后的接收机坐标。
伪距单点定位函数
%% 伪距单点定位函数
function [User_Position_Range,G] = Least_square_Position_Range...
(Satellite_Position,Range,Initial_Position,Error_Correction)
% Input:
% Satellite_Position卫星坐标
% Range伪距观测值
% Initial_Position初值
% Error_Correction误差修正数
% Output:
% User_Position_Range接收机坐标
% G雅可比矩阵
%% 初始化
Number_of_Iterations = 20;%迭代次数
convergence_threshold = 1e-6;%收敛阈值
P = Satellite_Position;
Number_of_Satellites = size(Satellite_Position, 2);
User_Position_Range = [Initial_Position;0];
G = zeros(Number_of_Satellites,4);%伪距雅可比矩阵
delta_Range=zeros(Number_of_Satellites,1);
for j=1:Number_of_Iterations
for i=1:Number_of_Satellites
%---------------- 第一次迭代初始化变量 -------------------------
Satellite_Rot=P(:,i);
%--------------------应用更正----------------------------------
range = norm(Satellite_Rot-User_Position_Range(1:3),'fro');
delta_Range(i)=Range(i) + Error_Correction(i) - range - User_Position_Range(4);
%--------------- 构造雅可比矩阵 --------------------------------
G(i,:)=[(User_Position_Range(1)-Satellite_Rot(1))/range,...
(User_Position_Range(2)-Satellite_Rot(2))/range,...
(User_Position_Range(3)-Satellite_Rot(3))/range,1];
end
%--- Find position update ---------------------------------------------
delta_X_Range = (G'*G)\(G'* delta_Range);
%--- Apply position update --------------------------------------------
User_Position_Range = User_Position_Range + delta_X_Range;if norm(delta_X_Range) < convergence_threshold
disp(['Converged after ', num2str(j), ' iterations.']);
break;
end
end
end
DOP值计算函数
function [GDOP, PDOP] = DOP_calculate(G)
% 计算 G 矩阵的伪逆
Q = inv(G' * G);
GDOP = sqrt(trace(Q));
PDOP = sqrt(trace(Q(1:3, 1:3)));
end
主函数
% 初始解
Initial_Position = [-2441267.123; 4790213.231; 3419994.321];
% 卫星钟差、对流层延迟误差、电离层延迟误差等
Error_Correction = [-24286.492 -43822.577 -116967.755 -7834.145 30330.506];
% 伪距观测值
Range = [23244182.861 23934824.154 24181945.803 22957572.28 22385541.968];
% 卫星坐标(按列排列)
Satellite_Position = [13550285.883 -9754080.537 13615174.294 -20328139.067 -21641940.073;
18190574.884 21155869.384 7856984.053 508157.447 15217052.005;
13721537.673 -12506802.672 21398396.517 17172573.272 -1309766.601];% 伪距单点定位求解
[User_Position_Range,G] = Least_square_Position_Range...
(Satellite_Position,Range,Initial_Position,Error_Correction);% Dop值计算
[GDOP,PDOP] = DOP_calculate(G);disp("伪距单点定位坐标:");
disp(User_Position_Range(1:3));
disp("GDOP值:");
disp(GDOP);
disp("PDOP值:");
disp(PDOP);

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 30
30 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)