低秩矩阵模型的推导与详解
让我们从基本概念开始:设M∈Rm×nM∈Rm×n为一个m×nm \times nm×n的实矩阵。其秩(rank)rankMmaxk存在k个线性无关的行向量或列向量= \max \{ k : \text{存在 $k$ 个线性无关的行向量或列向量} \}.rankMmaxk存在k个线性无关的行向量或列向量通俗地说,秩可以理解为矩阵真实的“维度”或“复杂度”。当rankMr≪minmnrankMr≪
低秩矩阵模型的推导与详解
目录
引言
在数据科学、机器学习和信号处理等众多领域,我们经常面对海量的、高维的矩阵数据。例如:
- 推荐系统:有数百万用户和数十万物品的打分矩阵;
- 图像处理:一张图片可以被看作一个像素矩阵,甚至是三维张量(多通道 RGB);
- 金融数据:协方差矩阵、时间序列数据等。
这些矩阵往往存在冗余信息或缺失值。低秩矩阵模型 能够有效地利用 “秩小” 这一先验,帮助我们实现降维、去噪、补全数据等重要任务。
低秩矩阵的定义
让我们从基本概念开始:设 M ∈ R m × n M \in \mathbb{R}^{m \times n} M∈Rm×n 为一个 m × n m \times n m×n 的实矩阵。其秩(rank) 定义为:
r a n k ( M ) = max { k : 存在 k 个线性无关的行向量或列向量 } . \mathrm{rank}(M) = \max \{ k : \text{存在 $k$ 个线性无关的行向量或列向量} \}. rank(M)=max{k:存在 k 个线性无关的行向量或列向量}.
通俗地说,秩可以理解为矩阵真实的“维度”或“复杂度”。当
r a n k ( M ) = r ≪ min ( m , n ) \mathrm{rank}(M) = r \ll \min(m,n) rank(M)=r≪min(m,n)
时,我们就称 M M M 是一个 低秩矩阵(Low-rank Matrix)。
为什么低秩很重要?在数据驱动的场景中,如果矩阵是低秩的,就意味着其中大部分信息可由少数几个“方向”或“基”所刻画。这为我们带来了以下好处:
- 降维:只需存储或关注这几个主要方向即可;
- 去噪:在带有噪声的高维数据中,低秩成分往往被看作信号,噪声往往对应高秩或稀疏干扰;
- 补全:低秩假设下,矩阵的少部分观测值也可能足以推断出矩阵的整体结构。
奇异值分解(SVD)与低秩矩阵
对于任何一个矩阵 M ∈ R m × n M \in \mathbb{R}^{m \times n} M∈Rm×n,它都可以进行 奇异值分解(Singular Value Decomposition,SVD)。
SVD 的形式可写作:
M = U Σ V T , M = U \Sigma V^T, M=UΣVT,
其中:
- U ∈ R m × m U \in \mathbb{R}^{m \times m} U∈Rm×m 是正交矩阵(满足 U T U = I U^T U = I UTU=I),其列向量称为 左奇异向量;
- V ∈ R n × n V \in \mathbb{R}^{n \times n} V∈Rn×n 同样是正交矩阵(满足 V T V = I V^T V = I VTV=I),其列向量称为 右奇异向量;
- Σ ∈ R m × n \Sigma \in \mathbb{R}^{m \times n} Σ∈Rm×n 是一个对角矩阵(在非方矩阵时,对角线部分在前面),其对角元素
σ 1 ≥ σ 2 ≥ … ≥ σ min ( m , n ) ≥ 0 \sigma_1 \ge \sigma_2 \ge \ldots \ge \sigma_{\min(m,n)} \ge 0 σ1≥σ2≥…≥σmin(m,n)≥0
称为 奇异值(Singular Values)。
事实上,若 r a n k ( M ) = r \mathrm{rank}(M) = r rank(M)=r,则只有前 r r r 个奇异值为正,其余为零。例如,若 r ≪ min ( m , n ) r \ll \min(m,n) r≪min(m,n),你就可以看到 SVD 中出现大量的零奇异值,体现了矩阵的低秩性质。
Eckart–Young–Mirsky 定理
Eckart–Young–Mirsky 定理(也称为矩阵低秩逼近的最优性定理)指出:
给定矩阵 M M M 的 SVD 为 M = U Σ V T M = U\Sigma V^T M=UΣVT。如果我们想要在秩为 k k k 的所有矩阵中找到与 M M M 在某种范数下(如弗罗贝尼乌斯范数 ∥ ⋅ ∥ F \|\cdot\|_F ∥⋅∥F)距离最小的矩阵,则该最优解刚好是把 M M M 的 SVD 中所有奇异值除了最大的 k k k 个之外全部置零再重构出的矩阵。
用公式表示,当 ∥ ⋅ ∥ \|\cdot\| ∥⋅∥ 为弗罗贝尼乌斯范数 ∥ ⋅ ∥ F \|\cdot\|_F ∥⋅∥F 时,最优逼近矩阵为
M k = U d i a g ( σ 1 , … , σ k , 0 , … , 0 ) V T , M_k = U \,\mathrm{diag}(\sigma_1,\ldots,\sigma_k,0,\ldots,0)\,V^T, Mk=Udiag(σ1,…,σk,0,…,0)VT,
并且其逼近误差最小。该结果在低秩逼近理论和应用中都非常关键。
低秩矩阵模型的常见形式
矩阵分解模型
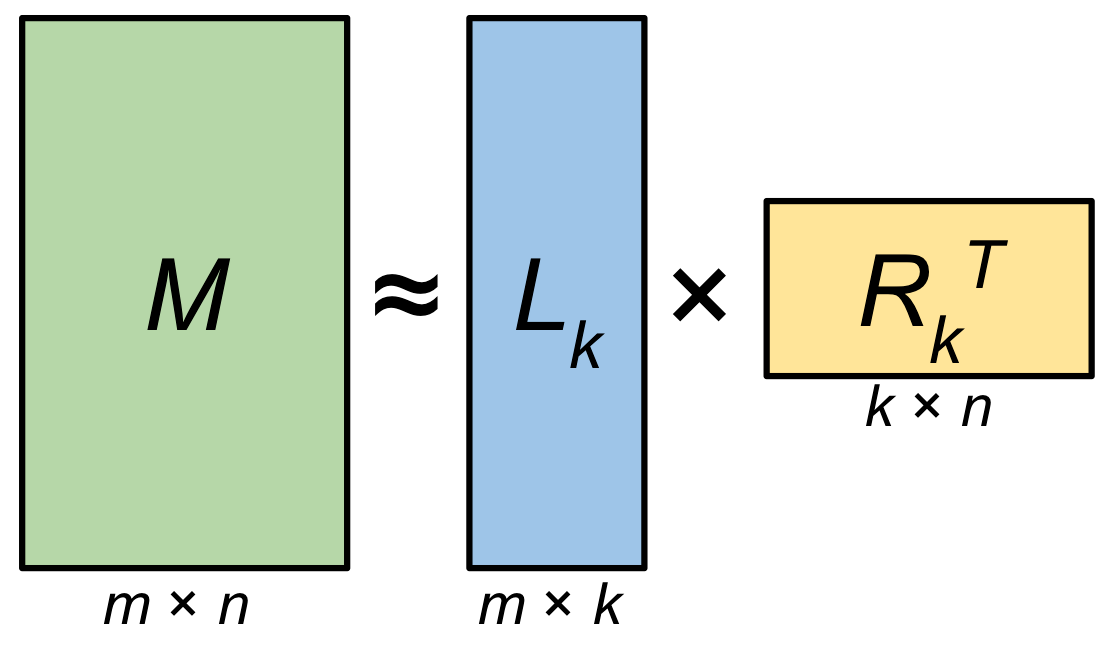
如果我们明确地假设一个矩阵 M M M 的秩最多是 r r r,就可以在模型中将 M M M 表示成如下形式:
M = U V T , M = U V^T, M=UVT,
其中
U ∈ R m × r , V ∈ R n × r . U \in \mathbb{R}^{m \times r}, \quad V \in \mathbb{R}^{n \times r}. U∈Rm×r,V∈Rn×r.
这样一来,我们把原先可能有 m × n m \times n m×n 个自由参数的矩阵,降低成 m × r + n × r m \times r + n \times r m×r+n×r 个自由参数。当 r ≪ m , n r \ll m,n r≪m,n 时,所需参数量将显著降低。
在 推荐系统 中,这样的分解可以用来表示用户与物品之间的潜在交互:
- U U U 的第 i i i 行(记作 U i , : U_{i,:} Ui,:)可看作用户 i i i 的“潜在因子”向量;
- V V V 的第 j j j 行(记作 V j , : V_{j,:} Vj,:)可看作物品(电影、商品等) j j j 的“潜在因子”向量;
- 用户对物品的评分(或偏好)就近似于二者向量的内积 ( U V T ) i j (UV^T)_{ij} (UVT)ij。
在这个思路基础上,还可添加正则化项、偏置项等,形成更实际的 矩阵分解 和 协同过滤 模型。
核范数最小化(Nuclear Norm Minimization)
除了直接做矩阵分解的形式,核范数最小化 在许多低秩场景中也是非常重要且常用的方法。
核范数与最小秩的关系
-
矩阵的核范数(Nuclear Norm)(也称 迹范数 Trace Norm)定义为:
∥ M ∥ ∗ = ∑ i = 1 min ( m , n ) σ i ( M ) , \|M\|_* = \sum_{i=1}^{\min(m,n)} \sigma_i(M), ∥M∥∗=i=1∑min(m,n)σi(M),
其中 σ i ( M ) \sigma_i(M) σi(M) 是矩阵 M M M 的第 i i i 个奇异值。 -
矩阵的秩(rank) 可以看作矩阵非零奇异值的个数:
r a n k ( M ) = # { i ∣ σ i ( M ) ≠ 0 } . \mathrm{rank}(M) = \#\{\,i \mid \sigma_i(M) \neq 0 \}. rank(M)=#{i∣σi(M)=0}.
如果我们想让矩阵秩变小,就希望奇异值的个数越少越好。但 最小化 r a n k ( M ) \mathrm{rank}(M) rank(M) 是一个非凸问题,往往是 NP-hard。作为一种凸松弛做法,我们可以最小化核范数 ∥ M ∥ ∗ \|M\|_* ∥M∥∗ 代替最小化 r a n k ( M ) \mathrm{rank}(M) rank(M)。
因为在几何上,核范数是所有奇异值之和,而秩是非零奇异值的个数。二者的取值趋势是相似的:当一个矩阵的秩较小,其非零奇异值往往集中在前面几个,此时核范数也相对较小。
基于这一思想,人们常常写出下述凸优化形式:
min X ∥ X ∥ ∗ subject to A ( X ) = b , \min_{X} \quad \|X\|_* \quad \text{subject to }\; \mathcal{A}(X) = b, Xmin∥X∥∗subject to A(X)=b,
其中 A \mathcal{A} A 表示线性算子(如“采样测量”), b b b 是观测数据;通过约束 A ( X ) = b \mathcal{A}(X) = b A(X)=b 逼迫 X X X 与数据一致,再通过 ∥ X ∥ ∗ \|X\|_* ∥X∥∗ 使 X X X 保持低秩。
矩阵补全问题示例
Netflix问题
Netflix 问题 是协同过滤中的一个经典案例。设:
- M M M 为用户-物品(例如用户-电影)的评分矩阵,大小为 m × n m \times n m×n;
- Ω \Omega Ω 表示观测到评分的位置(即用户对哪些电影给出了评分), ∣ Ω ∣ |\Omega| ∣Ω∣ 通常远小于 m n mn mn;
- 目标是根据已有的评分来推断(补全)所有用户对所有物品的评分。
由于用户的兴趣和物品的属性往往受少数几个“潜在因子”主导,人们一般假设 M M M 是一个 近似低秩矩阵。
最优目标与推导
最朴素的做法可能是:
min X r a n k ( X ) , subject to X i j = M i j , ∀ ( i , j ) ∈ Ω . \min_{X} \quad \mathrm{rank}(X), \quad \text{subject to} \; X_{ij} = M_{ij}, \; \forall (i,j)\in \Omega. Xminrank(X),subject toXij=Mij,∀(i,j)∈Ω.
即在所有能满足已观测评分的矩阵中找到秩最小者。但这个问题非凸,且往往难以求解。
松弛与等价形式
将秩最小化换成核范数最小化后,就有了核范数最小化矩阵补全:
min X ∥ X ∥ ∗ subject to X i j = M i j , ( i , j ) ∈ Ω . \min_{X} \quad \|X\|_* \quad \text{subject to} \quad X_{ij} = M_{ij}, \;(i,j)\in\Omega. Xmin∥X∥∗subject toXij=Mij,(i,j)∈Ω.
这是一个凸优化问题,可以利用现有的凸优化算法,如 SVT(奇异值软阈值)、APG(加速近端梯度) 等方法来求解。其数学几何含义是:我们在所有能满足观测值的矩阵中,选取奇异值总和最小者,这往往与选取秩最小者具有相同的效果(在很多情况下等价或近似等价),因此可以极大地减少矩阵的自由度。
低秩矩阵求解方法
软阈值奇异值收缩(SVT)
SVT (Singular Value Thresholding) 算法是核范数最小化的一种经典求解思路。核心公式可以写作对奇异值的“软阈值”操作:
- 给定一个矩阵 Y Y Y,令其 SVD 为
Y = U Σ V T , Σ = d i a g ( σ 1 , … , σ p ) , Y = U \Sigma V^T, \quad \Sigma = \mathrm{diag}(\sigma_1,\ldots,\sigma_p), Y=UΣVT,Σ=diag(σ1,…,σp),
其中 p = min ( m , n ) p = \min(m,n) p=min(m,n)。 - 对对角元素(奇异值) σ i \sigma_i σi 做如下变换:
D τ ( Σ ) = d i a g ( max { σ 1 − τ , 0 } , max { σ 2 − τ , 0 } , … , max { σ p − τ , 0 } ) . D_{\tau}(\Sigma) = \mathrm{diag}(\max\{\sigma_1-\tau,0\}, \max\{\sigma_2-\tau,0\}, \dots, \max\{\sigma_p-\tau,0\}). Dτ(Σ)=diag(max{σ1−τ,0},max{σ2−τ,0},…,max{σp−τ,0}).
这一步称为“软阈值(soft-thresholding)”, τ \tau τ 是阈值参数。 - 将变换后的奇异值重新与 U U U、 V V V 相乘,
D τ ( Y ) = U D τ ( Σ ) V T . \mathcal{D}_{\tau}(Y) = U \,D_{\tau}(\Sigma)\,V^T. Dτ(Y)=UDτ(Σ)VT. - 迭代地使用此操作来逼近最优解。
在矩阵补全问题中,SVT 算法每次会根据已知观测位置对矩阵进行更新,并对更新后的矩阵应用奇异值软阈值收缩,最终在满足约束的同时尽可能降低核范数,从而得到一个近似秩小的矩阵解。
交替最小二乘法(ALS)
如果我们使用 矩阵分解模型 直接去逼近一个部分观测矩阵,可以考虑如下目标:
min U , V ∑ ( i , j ) ∈ Ω ( M i j − ( U V T ) i j ) 2 + λ ( ∥ U ∥ F 2 + ∥ V ∥ F 2 ) , \min_{U,V} \sum_{(i,j)\in\Omega} \Bigl(M_{ij} - (UV^T)_{ij}\Bigr)^2 + \lambda (\|U\|_F^2 + \|V\|_F^2), U,Vmin(i,j)∈Ω∑(Mij−(UVT)ij)2+λ(∥U∥F2+∥V∥F2),
其中 λ \lambda λ 是正则化系数,以防止过拟合。这个目标函数常见于推荐系统中的矩阵分解算法。为求解它,可以使用 交替最小二乘 (Alternating Least Squares, 简称 ALS):
- 固定 V V V,把上式看成关于 U U U 的二次型,求导并令其为零,即可解出最优 U U U;
- 固定求得的 U U U,再对 V V V 做同样操作;
- 在两个步骤之间来回迭代,直到收敛。
举例来说,固定 V V V 时,目标函数关于 U U U 的偏导为:
∂ ∂ U ( ∑ ( i , j ) ∈ Ω ( M i j − U i , : V j , : T ) 2 + λ ∥ U ∥ F 2 ) = 0 , \frac{\partial}{\partial U} \Bigl(\sum_{(i,j)\in\Omega} (M_{ij} - U_{i,:} V_{j,:}^T)^2 + \lambda \|U\|_F^2\Bigr) = 0, ∂U∂((i,j)∈Ω∑(Mij−Ui,:Vj,:T)2+λ∥U∥F2)=0,
求解可得到一组线性方程。对于每一行 U i , : U_{i,:} Ui,: 的具体更新,也可分块进行。ALS 实现简单,且在大规模数据下只要迭代次数不多,也能达到不错的效果。
梯度方法与凸优化思路
对于 核范数最小化 的问题,除了 SVT,还有以下常用凸优化方法:
- 近端梯度(Proximal Gradient)、加速近端梯度(Accelerated Proximal Gradient, APG);
- ADMM(交替方向乘子法) 等。
其核心都在于:核范数是奇异值的 ℓ 1 \ell_1 ℓ1 范数之和,可以在迭代中对矩阵做 奇异值分解 并结合“软阈值”进行近端映射。因为 ∥ X ∥ ∗ \|X\|_* ∥X∥∗ 的近端映射正是上述的 软阈值收缩 操作,这使得核范数最小化在理论上可行并在实践中有较好效率。
低秩矩阵应用领域
- 推荐系统:如 Netflix 问题、电子商务商品推荐,核心思路都是基于用户-物品评分矩阵的低秩假设来预测缺失评分。
- 图像与视频修复:很多图像在本质上可以用低秩矩阵来描述(或稀疏+低秩组合),对缺损或带噪声的图像进行修复、去背景等都是典型应用。
- 压缩感知:在高维信号处理中,如果信号或其某种转换矩阵是低秩的,就能用更少的采样去重建完整数据。
- 协方差矩阵估计:在高维统计和金融分析中,为了避免过拟合和噪声影响,人们常假设协方差矩阵是低秩或接近低秩,从而获得更加鲁棒的估计结果。
- 自回归模型、时序分析:利用 Hankel 矩阵(包含时序信号)和其潜在的低秩结构来做预测或异常检测。
一个简单的Python示例:利用SVD进行低秩近似
下面用一个小的 Python 例子,展示如何使用 截断式 SVD 来得到矩阵的一个秩较低的近似。
假设我们有一个 6 × 6 6\times 6 6×6 的随机矩阵 A A A,想把它逼近成秩为 k k k 的矩阵。
import numpy as np
# 设置随机种子
np.random.seed(42)
# 生成一个 6x6 的随机矩阵
A = np.random.randn(6, 6)
print("原矩阵 A:")
print(A)
# 进行SVD分解
U, S, VT = np.linalg.svd(A, full_matrices=False)
# 设定要保留的秩
rank_k = 2
# 构造只保留前k个奇异值的对角矩阵
S_k = np.zeros_like(S)
S_k[:rank_k] = S[:rank_k]
# 重构低秩近似矩阵 (注意U、VT的大小和S的形状)
A_k = (U * S_k) @ VT
print(f"\n保留前 {rank_k} 个奇异值的低秩近似矩阵 A_k:")
print(A_k)
# 计算Frobenius范数下的逼近误差
error = np.linalg.norm(A - A_k, 'fro')
print(f"\nFrobenius 范数误差: {error:.4f}")
总结
- 低秩矩阵模型 通过限制矩阵的秩来降低自由度,可以在 矩阵补全、降维、去噪、特征提取 等任务中提供显著优势。
- SVD 是分析和处理低秩矩阵的关键工具,尤其在 低秩逼近 中有着决定性地位;Eckart–Young–Mirsky 定理为截断式 SVD 在最小二乘意义上的最优性提供了理论支撑。
- 矩阵分解模型( M ≈ U V T M \approx UV^T M≈UVT)和 核范数最小化(凸松弛)是两大主要实现形式:
- 矩阵分解是直接显式地写出秩为 r r r 的分解形式;
- 核范数最小化则是通过最小化 ∑ i σ i ( M ) \sum_i \sigma_i(M) ∑iσi(M) 来隐式地逼近小秩解。
- 矩阵补全 问题(如 Netflix)将最小秩问题替换为最小核范数问题,利用 SVT 等算法能较好地在缺失数据场景下恢复原矩阵。
- 求解方法 涉及到 SVT(奇异值软阈值)、ALS(交替最小二乘)、近端梯度法、ADMM 等;根据不同数据规模与需求,选择合适的算法可在效率与收敛精度间取得平衡。
- 应用范围 已经渗透到推荐系统、图像处理、信号处理、高维统计等等,对理论研究和实际工程都极为关键。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 12
12 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)