镭神N10P激光雷达open_port /dev/ttyUSB0 ERROR !/open_port /dev/wheeltec_lidar ERROR !
显示报错:(或者显示open_port /dev/wheeltec_lidar ERROR!解决方法:给串口增加权限。
·
运行:
roslaunch lslidar_driver lslidar_serial.launch显示报错:(或者显示open_port /dev/wheeltec_lidar ERROR !)
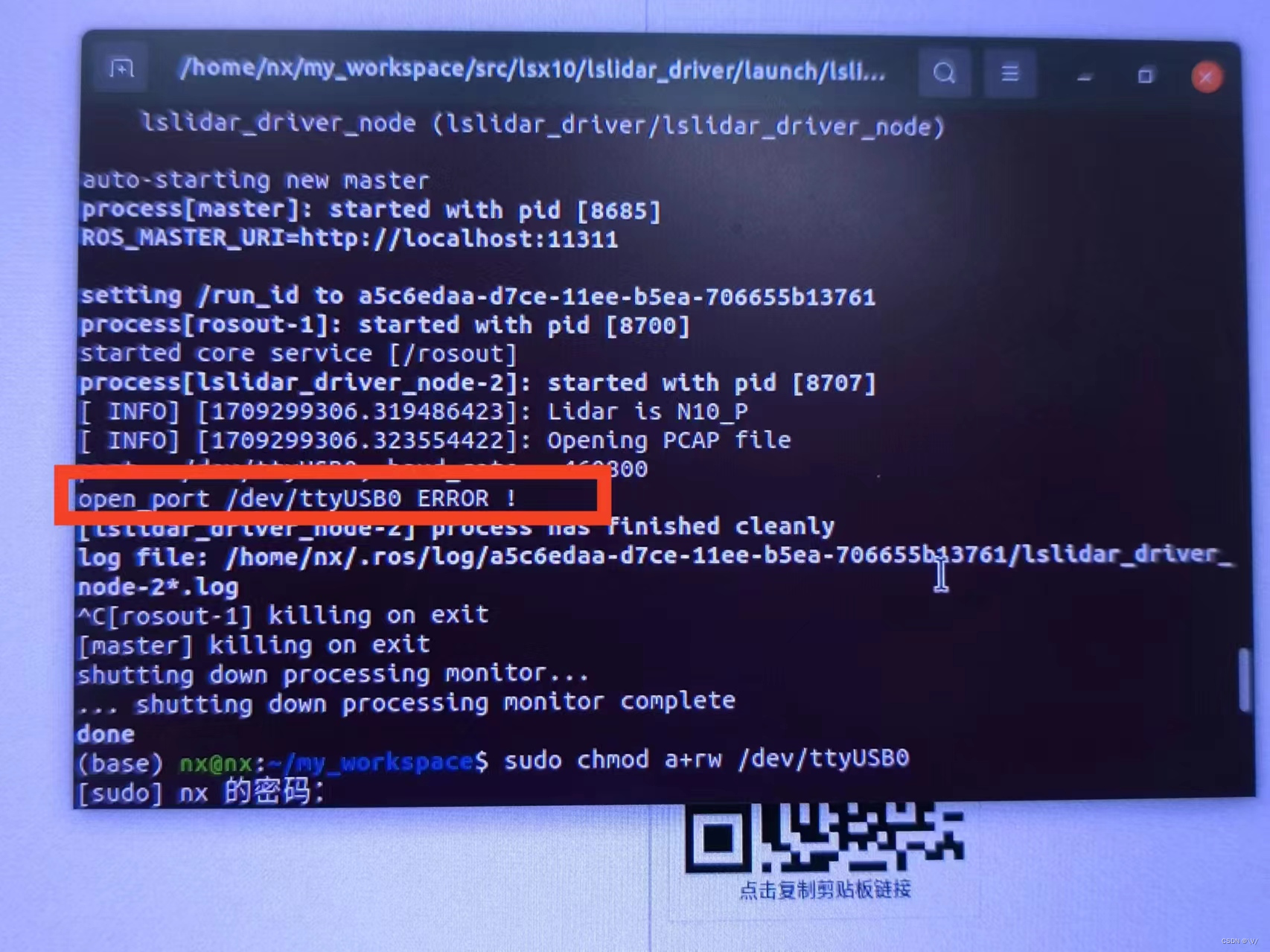
解决方法:给串口增加权限
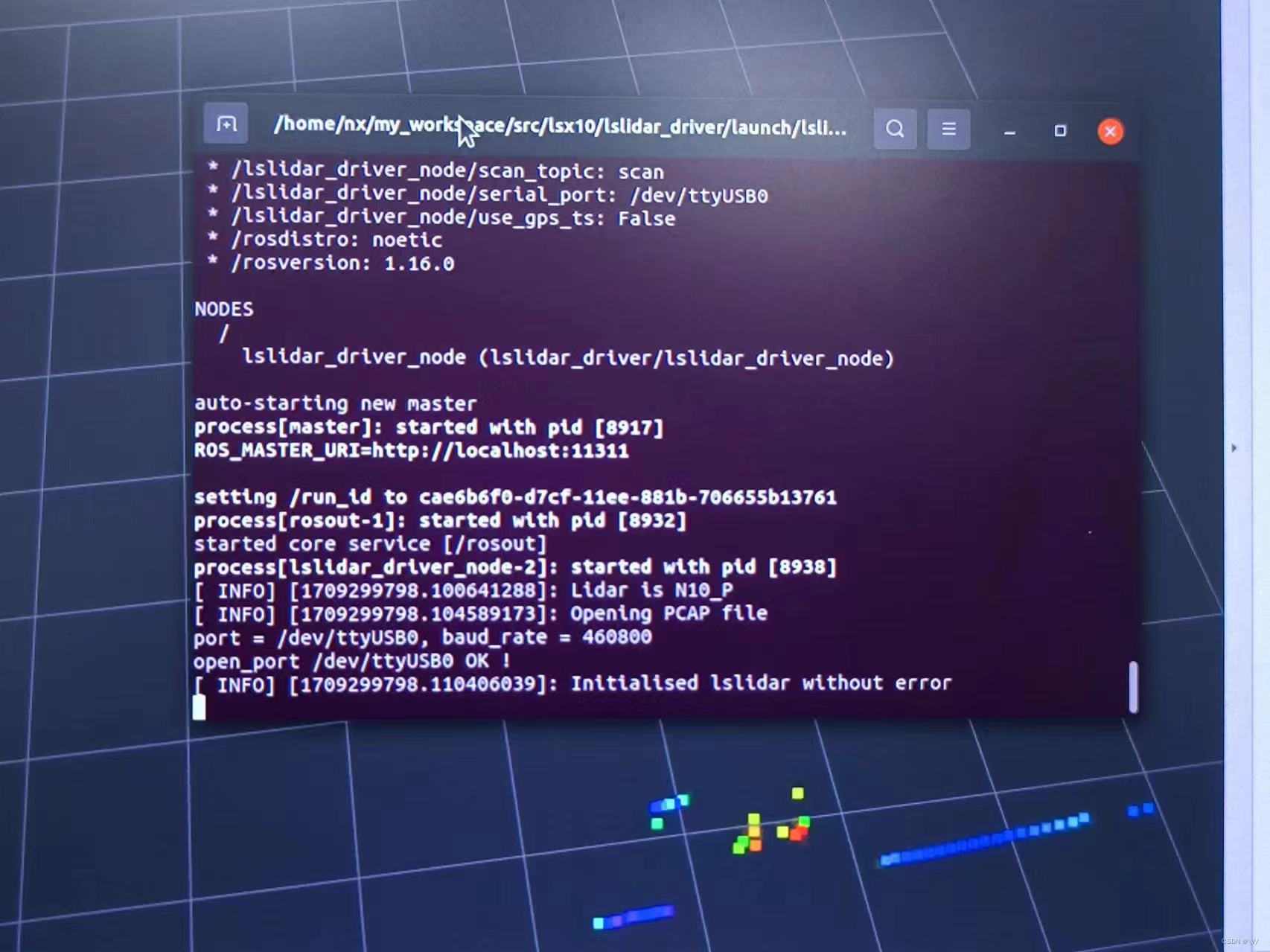
sudo chmod a+rw /dev/ttyUSB0之后继续执行:
roslaunch lslidar_driver lslidar_serial.launch此时雷达节点应该能成功启动,如图:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)