微积分(下)·知识整理
简单梳理了一下《微积分下》的重要知识。
基于华科《微积分学(上)》(第四版)整理的部分知识目录。更好的观感,请移步我的笔记网站,点个 star 再走吧~
7 常微分方程
一阶线性微分方程
一元函数的微分方程称为常微分方程。下式是一阶线性方程的通式。
y ′ + a ( x ) y = b ( x ) (7.1) y^\prime+a(x)y=b(x)\tag{7.1} y′+a(x)y=b(x)(7.1) 对于式 ( 7.1 ) (7.1) (7.1),课本上给出了通解为:
y = e − ∫ a ( x ) d x [ C + ∫ b ( x ) e ∫ a ( x ) d x d x ] (7.2) y=\mathrm e^{-\int a(x)\mathrm dx}\left[C+\int b(x)\mathrm e^{\int a(x)\mathrm dx}\mathrm dx\right]\tag{7.2} y=e−∫a(x)dx[C+∫b(x)e∫a(x)dxdx](7.2)
书上通过常数变易法得到这个解,感觉这个方法其实就是猜。
需要说明的是,式 ( 7.2 ) (7.2) (7.2) 前后的 ∫ a ( x ) \int a(x) ∫a(x) 必须是一样的。换句话说就是,我不能前面的 ∫ a ( x ) = A ( x ) + C 1 \int a(x)=A(x)+C _ 1 ∫a(x)=A(x)+C1,后面的 ∫ a ( x ) = A ( x ) + C 2 \int a(x)=A(x)+C _ 2 ∫a(x)=A(x)+C2,而 C 1 ≠ C 2 C _ 1\neq C _ 2 C1=C2。
Bernoulli 方程
对于下面的微分方程,也称为 Bernoulli 方程,需要两边同时乘以 y − n y^{-n} y−n,变成关于 y 1 − n y^{1-n} y1−n 的一阶线性微分方程,从而使用式 ( 7.1 ) (7.1) (7.1) 进行求解。
y ′ = a ( x ) y + b ( x ) y n ( n ≠ 0 , 1 ) (7.3) y^\prime=a(x)y+b(x)y^n\quad(n\neq0,1)\tag{7.3} y′=a(x)y+b(x)yn(n=0,1)(7.3) Bernoulli 方程是一阶非线性微分方程。你也注意到了,含有常数项的方程不是 Bernoulli 方程,就没法用这种方式求解。
齐次方程
满足 F ( a x , a y ) = 0 F(ax,ay)=0 F(ax,ay)=0 的方程 F ( x , y ) = 0 F(x,y)=0 F(x,y)=0 是齐次方程。对于这类方程,尝试使用 t = y x t =\cfrac{y}{x} t=xy 进行换元,得到 t t t 关于 x x x 的微分方程,可能会简化计算。
一类可以转化为齐次方程的微分方程 有一些微分方程,在去掉某一项后就是其次的微分方程。比如下面这个
( x 2 + y 2 + 3 ) d y d x = 2 x ( 2 y − x 2 y ) (x^2+y^2+3)\cfrac{\mathrm dy}{\mathrm dx}=2x(2y-\cfrac{x^2}{y}) (x2+y2+3)dxdy=2x(2y−yx2) 要是没有这个 3 3 3 就好了。这题我们在凑微分的时候,也容易发现凑出来的都是 x , y x,y x,y 的偶数次项,很容易想到换元 u = x 2 , v = y 2 u=x^2,v=y^2 u=x2,v=y2,从而有
d v d u = 2 ( 2 v − u ) u + v + 3 \cfrac{\mathrm dv}{\mathrm du}=\cfrac{2(2v-u)}{u+v+3} dudv=u+v+32(2v−u) 依然,这个 3 3 3 的存在很麻烦。考虑到 d ( x + c ) = d x \mathrm d(x+c)=\mathrm dx d(x+c)=dx,我们可以令 U = u + a U=u+a U=u+a, V = v + b V=v+b V=v+b,其中 a , b a,b a,b 都是常数,希望能够将微分方程转换为如下所示的齐次方程便于后续解题
d V d U = 2 ( 2 V − U ) U + V + 3 \cfrac{\mathrm dV}{\mathrm dU}=\cfrac{2(2V-U)}{U+V+3} dUdV=U+V+32(2V−U) 很容易能找到 a = 2 , b = 1 a=2,b=1 a=2,b=1,接下来就可以使用齐次方程的方法了。
二阶微分方程的解法
特殊方程(缺元)的降阶法
对于一些高阶的微分方程,可以尝试降为一阶微分方程,从而应用式 ( 7.1 ) (7.1) (7.1) 或者其他方式求解。两种典型的降阶方式:
- 对于 y ′ ′ = f ( x , y ′ ) y^{\prime\prime}=f(x,y^\prime) y′′=f(x,y′) 这类微分方程(缺 y y y 方程),可以使用 p = y ′ p=y^\prime p=y′,化为自变量为 x x x,因变量为 p p p 的微分方程。
- 对于 y ′ ′ = f ( y , y ′ ) y^{\prime\prime}=f(y,y^\prime) y′′=f(y,y′) 这类微分方程(缺 x x x 方程),可以使用 p = y ′ p=y^\prime p=y′,化为自变量为 y y y,因变量为 p p p 的微分方程。这个方法是比较巧妙的。
上述微分方程有着特殊性,缺 y y y 或缺 x x x,对于 F ( x , y , y ′ , y ′ ′ ) = 0 F(x,y,y^\prime,y^{\prime\prime})=0 F(x,y,y′,y′′)=0 这类方程则不适用。
这个方法没有要求是线性微分方程。
已知一个解的线性齐次方程
二阶线性微分方程若不含只含 x x x 的多项式,则是齐次方程,形式如下:
y ′ ′ + a ( x ) y ′ + b ( x ) y = 0 (7.4) y^{\prime\prime}+a(x)y^\prime+b(x)y=0\tag{7.4} y′′+a(x)y′+b(x)y=0(7.4) 这种方程如果已知一个解 y 1 ( x ) y _ 1(x) y1(x),则可以求出另外一个线性无关的解。
具体做法是构造一个新解 y 2 ( x ) = v y 1 ( x ) y _ 2(x)=vy _ 1(x) y2(x)=vy1(x),以 y 2 y _ 2 y2 代微分方程中的 y y y,然后令 u = v ′ u=v^\prime u=v′,即可得到 u u u 关于 x x x 的一阶微分方程。从中可以解出 u u u,进而得到 y 2 ( x ) y _ 2(x) y2(x)。
已知齐次方程通解的非齐次方程
二阶线性非齐次方程的形式如下:
y ′ ′ + a ( x ) y ′ + b ( x ) y = f ( x ) (7.5) y^{\prime\prime}+a(x)y^\prime+b(x)y=f(x)\tag{7.5} y′′+a(x)y′+b(x)y=f(x)(7.5) 我们解 ( 7.4 ) (7.4) (7.4) 的得到的通解应该是 y = C 1 y 1 ( x ) + C 2 y 2 ( x ) (7.6) y=C _ 1y _ 1(x)+C _ 2y _ 2(x)\tag{7.6} y=C1y1(x)+C2y2(x)(7.6) 将这个解的常数变成未知数,即常数变易法,从而猜测 ( 7.5 ) (7.5) (7.5) 的通解具有如下形式:
y = V 1 ( x ) y 1 ( x ) + V 2 ( x ) y 2 ( x ) (7.7) y=V _ 1(x)y _ 1(x)+V _ 2(x)y _ 2(x)\tag{7.7} y=V1(x)y1(x)+V2(x)y2(x)(7.7) 同时,加上下面的限定条件 ( 7.8 ) (7.8) (7.8),使得 V 1 , V 2 V _ 1,V _ 2 V1,V2 能够被解出来,且方便求解。
V 1 ′ y 1 + V 2 ′ y 2 = 0 (7.8) V _ 1^\prime y _ 1+V _ 2^\prime y _ 2=0\tag{7.8} V1′y1+V2′y2=0(7.8)
Euler 方程
所谓 Euler 方程,是指形如下式的微分方程。
x n y ( n ) + a 1 x n − 1 y ( n − 1 ) + ⋯ + a n y = f ( x ) (7.9) x^ny^{(n)}+a _ 1x^{n-1}y^{(n-1)}+\cdots+a _ ny=f(x)\tag{7.9} xny(n)+a1xn−1y(n−1)+⋯+any=f(x)(7.9) 这类方程,只需要令 x = e t x=\mathrm e^t x=et,根据式 ( 7.10 ) (7.10) (7.10) 即可转换为 y y y 关于 t t t 的常系数微分方程。
x k y ( k ) = D ( D − 1 ) ⋯ ( D − k + 1 ) y ( 1 ≤ k ≤ n ) (7.10) x^ky^{(k)}=D(D-1)\cdots(D-k+1)y\quad(1\leq k\leq n)\tag{7.10} xky(k)=D(D−1)⋯(D−k+1)y(1≤k≤n)(7.10) 式 ( 7.10 ) (7.10) (7.10) 中算子 D = d d t D=\cfrac{\mathrm d}{\mathrm dt} D=dtd,可以按照多项式乘法运算律进行计算。
8 矢量代数与空间解析几何
矢量及其线性运算
定比分点公式
这是一个常用的公式。若 A ( x 1 , y 1 , z 1 ) A(x _ 1,y _ 1,z _ 1) A(x1,y1,z1), B ( x 2 , y 2 , z 2 ) B(x _ 2,y _ 2,z _ 2) B(x2,y2,z2),且 A C / C B = λ ( λ ≠ − 1 ) AC/CB=\lambda(\lambda\neq-1) AC/CB=λ(λ=−1),那么 C C C 点的坐标为 ( x 1 + λ x 2 1 + λ , y 1 + λ y 2 1 + λ , z 1 + λ z 2 1 + λ ) \left(\cfrac{x _ 1+\lambda x _ 2}{1+\lambda},\cfrac{y _ 1+\lambda y _ 2}{1+\lambda},\cfrac{z _ 1+\lambda z _ 2}{1+\lambda}\right) (1+λx1+λx2,1+λy1+λy2,1+λz1+λz2)。实际上就是 A , B A,B A,B 坐标的一个加权平均。
方向角和方向余弦
这是一对可能比较陌生的概念。任意矢量 a \boldsymbol a a 与三坐标轴正向的夹角分别记为 α , β , γ \alpha,\beta,\gamma α,β,γ,那么:
- α , β , γ \alpha,\beta,\gamma α,β,γ 称为矢量 a \boldsymbol a a 的方向角。
- cos α , cos β , cos γ \cos\alpha,\cos\beta,\cos\gamma cosα,cosβ,cosγ 为矢量 a \boldsymbol a a 的方向余弦。
- 任意一组与 cos α , cos β , cos γ \cos\alpha,\cos\beta,\cos\gamma cosα,cosβ,cosγ 成比例的数 l , m , n l,m,n l,m,n 称为矢量 a \boldsymbol a a 的方向数。
实际上就有 a 0 = { cos α , cos β , cos γ } \boldsymbol a^0=\lbrace\cos\alpha,\cos\beta,\cos\gamma\rbrace a0={cosα,cosβ,cosγ},也即有
cos 2 α + cos 2 β + cos 2 γ = 1 (8.1) \cos^2\alpha+\cos^2\beta+\cos^2\gamma=1\tag{8.1} cos2α+cos2β+cos2γ=1(8.1)
矢量间的积
在现有的数量积基础上,引入矢量积概念。若 a = { a x , a y , a z } \boldsymbol a=\lbrace a _ x,a _ y,a _ z\rbrace a={ax,ay,az}, b = { b x , b y , b z } \boldsymbol b=\lbrace b _ x,b _ y,b _ z\rbrace b={bx,by,bz},则矢量积计算式为
a × b = ∣ i j k a x a y a z b x b y b z ∣ (8.2) \boldsymbol a\times\boldsymbol b=\left|\begin{matrix}\boldsymbol i&\boldsymbol j&\boldsymbol k\\ a _ x&a _ y&a _ z\\ b _ x&b _ y&b _ z\end{matrix}\right|\tag{8.2} a×b=
iaxbxjaybykazbz
(8.2)
矢量积的反交换律,可以从 ( 8.2 ) (8.2) (8.2) 的行列式得证。
混合积的表达式也很优美。 c = { c x , c y , c z } \boldsymbol c=\lbrace c _ x,c _ y,c _ z\rbrace c={cx,cy,cz},有
[ a b c ] = a ⋅ ( b × c ) = ∣ a x a y a z b x b y b z c x c y c z ∣ (8.3) [\boldsymbol{abc}]=\boldsymbol a\cdot(\boldsymbol b\times\boldsymbol c)=\left|\begin{matrix}a _ x&a _ y&a _ z\\ b _ x&b _ y&b _ z\\ c _ x&c _ y&c _ z\end{matrix}\right|\tag{8.3} [abc]=a⋅(b×c)=
axbxcxaybycyazbzcz
(8.3)
混合积的轮换性、反对称性都能从中看出,其实就是行列式的互换性质。混合积还有很美妙的几何意义(平行六面体的体积)。
9 多元函数微分学
多元函数
多元函数的极限和一元函数颇具类似之处。两个重要结论:
- 若 f ( P ) → l ( P → P 0 ) f(P)\to l(P\to P _ 0) f(P)→l(P→P0),则当 P P P 沿任一条曲线 y = y ( x ) y=y(x) y=y(x) 趋于 P 0 P _ 0 P0 时,都有 f ( P ) → l f(P)\to l f(P)→l。
其逆否命题往往用于说明一个多元函数在某点的极限不存在——当 P P P 沿不同曲线趋于 P 0 P _ 0 P0 时,极限不相等,或者有一个不存在,则多元函数在 P 0 P _ 0 P0 处的极限不存在。
- 若 f ( x , y ) f(x,y) f(x,y) 在定义域 D D D 的内点 ( x 0 , y 0 ) (x _ 0,y _ 0) (x0,y0) 连续,则一元函数 f ( x , y 0 ) f(x,y _ 0) f(x,y0) 与 f ( x 0 , y ) f(x _ 0,y) f(x0,y) 分别在点 x 0 x _ 0 x0 与 y 0 y _ 0 y0 连续;反之未必。
偏导数与全微分
偏导数
关于偏导数有一个重要结论:当混合偏导数存在且连续时,它们与对各变元的求导顺序无关。特别地,对于二元函数,若 z = f ( x , y ) z=f(x,y) z=f(x,y) 在区域 D D D 上存在连续的偏导数 f x y f _ {xy} fxy 与 f y x f _ {yx} fyx,则 f x y = f y x f _ {xy}=f _ {yx} fxy=fyx。
全微分
多元函数的全微分存在(可微)是一个很强的结论。由可微性可以得到多元函数连续,以及多元函数的偏导数存在。而为了得到可微性,一个充分条件是存在连续偏导数。
隐函数微分法
一般来说, n n n 个线性无关的方程在特定条件下可以隐式地确定 n n n 个函数(可以是一元或多元)。课本上给出了两个情形,其中一个是:
两个一元函数 u ( x ) , v ( x ) u(x),v(x) u(x),v(x) 的情形 设函数 F ( x , u , v ) F(x,u,v) F(x,u,v) 与 G ( x , u , v ) G(x,u,v) G(x,u,v) 在点 P 0 ( x 0 , u 0 , v 0 ) P _ 0(x _ 0,u _ 0,v _ 0) P0(x0,u0,v0) 的某个领域内关于自变量的偏导数都连续,且有
- F ( x 0 , u 0 , v 0 ) = G ( x 0 , u 0 , v 0 ) = 0 F(x _ 0,u _ 0,v _0)=G(x _0,u _0,v _0)=0 F(x0,u0,v0)=G(x0,u0,v0)=0
- J = ∣ F u F v G u G v ∣ P 0 ≠ 0 J=\left|\begin{matrix}F _ u&F _ v\\\\G _ u&G _ v\end{matrix}\right| _{P _0}\neq 0 J= FuGuFvGv P0=0
则存在 P 0 P _ 0 P0 的邻域 N N N 与含 x 0 x _ 0 x0 的区间 I I I,使得在 I I I 上有唯一的一组可谓函数 u = u ( x ) , v = v ( x ) ( x ∈ I ) u=u(x),v=v(x)(x\in I) u=u(x),v=v(x)(x∈I),满足 u 0 = u ( x 0 ) , v 0 = v ( x 0 ) , ( x , u ( x ) , v ( x ) ) ∈ U u _0=u(x _0),v _0=v(x _0),(x,u(x),v(x))\in U u0=u(x0),v0=v(x0),(x,u(x),v(x))∈U 以及方程组
{ F ( x , u ( x ) , v ( x ) ) = 0 , G ( x , u ( x ) , v ( x ) ) = 0 \begin{cases}F(x,u(x),v(x))=0,\\G(x,u(x),v(x))=0\end{cases} {F(x,u(x),v(x))=0,G(x,u(x),v(x))=0 并且有如下的导数计算公式
d u d x = − ∣ F x F v G x G v ∣ / J d v d x = − ∣ F u F x G u G x ∣ / J \cfrac{\mathrm du}{\mathrm dx}=-\left|\begin{matrix}F _ x&F _ v\\G _ x& G _ v\end{matrix}\right|\big/J\quad\cfrac{\mathrm dv}{\mathrm dx}=-\left|\begin{matrix}F _ u&F _ x\\G _ u& G _ x\end{matrix}\right|\big/J dxdu=− FxGxFvGv /Jdxdv=− FuGuFxGx /J
行列式看起来很难记,其实就是对 J J J 进行了一个变换。比如求 u u u 对 x x x 的导数,将 J J J 中的 u u u 换成 x x x 就可以了。
方向导数与梯度
方向导数存在的一个充分条件是可微。设 f ( x , y , z ) f(x,y,z) f(x,y,z) 在点 P 0 ( x 0 , y 0 , z 0 ) P _ 0(x _ 0,y _ 0,z _ 0) P0(x0,y0,z0) 可微, n \boldsymbol n n 是一方向余弦为 cos α , cos β , cos γ \cos\alpha,\cos\beta,\cos\gamma cosα,cosβ,cosγ 的非零矢量,则方向导数存在:
∂ f ( P 0 ) ∂ n = f x ( P 0 ) cos α + f y ( P 0 ) cos β + f z ( P 0 ) cos γ (9.1) \cfrac{\partial f(P _ 0)}{\partial\boldsymbol n}=f _ x(P _ 0)\cos\alpha+f _ y(P _ 0)\cos\beta+f _ z(P _ 0)\cos\gamma\tag{9.1} ∂n∂f(P0)=fx(P0)cosα+fy(P0)cosβ+fz(P0)cosγ(9.1)
从 ( 9.1 ) (9.1) (9.1) 的形式上看, f f f 的方向导数是 f f f 的各偏导数按照某个权重的“加权平均”。这些权重是该方向与坐标轴正方向的“接近程度”,用方向余弦刻画;权重的平方和为 1 1 1。
因为方向导数是多元函数在某个射线方向上的变化情况,所以它是一个很弱的结论,推不出偏导数存在,更推不出可微。当 f f f 在 P 0 P _ 0 P0 不可微,或者可微性未知时,使用式 ( 9.1 ) (9.1) (9.1) 可能会得到错误的结论。此时应该使用方向导数的定义式:
∂ f ( P 0 ) ∂ n = lim ρ → 0 + f ( x 0 + ρ cos α , y 0 + ρ cos β , z 0 + ρ cos γ ) − f ( x 0 , y 0 , z 0 ) ρ (9.2) \cfrac{\partial f(P _ 0)}{\partial\boldsymbol n}=\lim _ {\rho\to 0^+}\cfrac{f(x _ 0+\rho\cos\alpha,y _ 0+\rho\cos\beta,z _ 0+\rho\cos\gamma)-f(x _ 0,y _ 0,z _ 0)}{\rho}\tag{9.2} ∂n∂f(P0)=ρ→0+limρf(x0+ρcosα,y0+ρcosβ,z0+ρcosγ)−f(x0,y0,z0)(9.2) 梯度的定义是
g r a d f = { f x , f y , f z } (9.3) \operatorname{\bold{grad}} f=\lbrace f _ x,f _ y,f _ z\rbrace\tag{9.3} gradf={fx,fy,fz}(9.3)
多元函数的极值
自由极值
类似于一元函数的极值,我们看二元函数的极值时,首先会看一阶偏导 f x = f y = 0 f _ x=f _ y=0 fx=fy=0 是否成立;若成立则往往会看二阶偏导 f x x f _ {xx} fxx 和 f y y f _ {yy} fyy。但是仅有 f x x ( P 0 ) > 0 f _ {xx}(P _ 0) > 0 fxx(P0)>0 和 f y y ( P 0 ) > 0 f _ {yy}(P _ 0) > 0 fyy(P0)>0 并不足以说明 P 0 P _ 0 P0 是极小值点。类似地,仅有 f x x ( P 0 ) < 0 f _ {xx}(P _ 0) < 0 fxx(P0)<0 和 f y y ( P 0 ) < 0 f _ {yy}(P _ 0) < 0 fyy(P0)<0 并不足以说明 P 0 P _ 0 P0 是极大值点。
简单的来说,首先需要根据 Δ > 0 \Delta>0 Δ>0 来判断是极值点, Δ < 0 \Delta < 0 Δ<0 判断不是极值点,再根据二阶偏导的符号判断是何种极值点。其中
Δ = f x x ( P 0 ) f y y ( P 0 ) − f x y 2 ( P 0 ) (9.4) \Delta = f _ {xx}(P _ 0)f _ {yy}(P _ 0)-f _ {xy}^2(P _ 0)\tag{9.4} Δ=fxx(P0)fyy(P0)−fxy2(P0)(9.4)
条件极值
目标函数 f ( x 1 , ⋯ , x n ) f(x _ 1,\cdots,x _ n) f(x1,⋯,xn),约束条件为 g i ( x 1 , ⋯ , x n ) = 0 ( i = 1 , 2 , ⋯ , m ) g _ i(x _ 1,\cdots,x _ n)=0(i=1,2,\cdots,m) gi(x1,⋯,xn)=0(i=1,2,⋯,m)。在 f , g i ( i = 1 , 2 , ⋯ , m ) f,g _ i(i=1,2,\cdots,m) f,gi(i=1,2,⋯,m) 对 x j ( j = 1 , 2 , ⋯ , n ) x _ j(j=1,2,\cdots,n) xj(j=1,2,⋯,n) 均存在一阶连续偏导数的情况下,可以使用 Lagrange 乘数法求解条件极值。
构造 Lagrange 函数
L = f + ∑ i = 1 m λ i g i (9.5) L=f+\sum _ {i=1}^m\lambda _ ig _ i\tag{9.5} L=f+i=1∑mλigi(9.5) 即可通过式 ( 9.6 ) (9.6) (9.6) 求得 f f f 的驻点。
{ ∂ L ∂ x j = 0 ( j = 1 , 2 , ⋯ , n ) , g i = 0 ( i = 1 , 2 , ⋯ , m ) (9.6) \begin{cases}\cfrac{\partial L}{\partial x _ j}=0(j=1,2,\cdots,n),\\ g _ i=0(i=1,2,\cdots,m)\end{cases}\tag{9.6} ⎩
⎨
⎧∂xj∂L=0(j=1,2,⋯,n),gi=0(i=1,2,⋯,m)(9.6)
齐次函数的 Euler 定理
首先狭义地介绍一下什么是齐次函数。如果对于 n n n 元函数 f : R n → R f:\mathbb R^n\to \mathbb R f:Rn→R,任意 α ∈ R \alpha\in\mathbb R α∈R 和任意 x ∈ R n \boldsymbol x\in\mathbb R^n x∈Rn,都有下式成立
f ( α x ) = α k f ( x ) (9.7) f(\alpha\boldsymbol x)=\alpha^kf(\boldsymbol x)\tag{9.7} f(αx)=αkf(x)(9.7) 那么说 f f f 是 k k k 次齐次函数。
齐次函数的欧拉定理 若 k k k 次齐次函数 f : R n → R f:\mathbb R^n\to \mathbb R f:Rn→R 是可导的,那么
x ⋅ ∇ f ( x ) = k f ( x ) (9.8) \boldsymbol x\cdot\nabla f(\boldsymbol x)=kf(\boldsymbol x)\tag{9.8} x⋅∇f(x)=kf(x)(9.8)
这个定理的证明比较显然,结论也可以用于一些不等式的证明或者曲面积分的化简。
证明 记 f ( x ) = f ( x 1 , x 2 , ⋯ , x n ) f(\boldsymbol x)=f(x _ 1,x _ 2,\cdots,x _ n) f(x)=f(x1,x2,⋯,xn),对式 ( 9.7 ) (9.7) (9.7) 两边同时对 α \alpha α 求导,根据复合函数可得 x 1 f 1 ′ ( α x ) + ⋯ + x n f n ′ ( α x ) = k α k − 1 f ( x ) x _ 1f _ 1^\prime(\alpha\boldsymbol x)+\cdots+x _ nf _ n^\prime(\alpha\boldsymbol x)=k\alpha ^{k-1}f(\boldsymbol x) x1f1′(αx)+⋯+xnfn′(αx)=kαk−1f(x) 也即 x ⋅ ∇ f ( α x ) = k α k − 1 f ( x ) \boldsymbol x\cdot\nabla f(\alpha\boldsymbol x)=k\alpha^{k-1}f(\boldsymbol x) x⋅∇f(αx)=kαk−1f(x) 令 k = 1 k=1 k=1 即可得证。
10 重积分
关于变量代换
重积分通过变量代换计算时,需要乘上 ∣ J ∣ |J| ∣J∣。下面总结几个常见的变量代换:
| 代换名称 | 积分重数 | ∣ J ∣ \lvert J\rvert ∣J∣ | 变换式 |
|---|---|---|---|
| 极坐标代换 | 2 2 2 | r r r | ∬ D f ( x , y ) d σ = ∫ α β d θ ∫ r 1 ( θ ) r 2 ( θ ) r f ( r cos θ , r sin θ ) d r \displaystyle\iint\limits _ Df(x,y)\mathrm d\sigma=\int _ \alpha ^\beta\mathrm d\theta\int _ {r _ 1(\theta)}^{r _ 2(\theta)}rf(r\cos\theta,r\sin\theta)\mathrm dr D∬f(x,y)dσ=∫αβdθ∫r1(θ)r2(θ)rf(rcosθ,rsinθ)dr |
| 柱面坐标代换 | 3 3 3 | r r r | ∭ V f d v = ∫ α β d θ ∫ r 1 ( θ ) r 2 ( θ ) r d r ∫ z 1 ( r , θ ) z 2 ( r , θ ) f ( r cos θ , r sin θ , z ) d z \displaystyle\iiint\limits _ Vf\mathrm dv=\int _ \alpha ^\beta\mathrm d\theta\int _ {r _ 1(\theta)}^{r _ 2(\theta)}r\mathrm dr\int _ {z _ 1(r,\theta)}^{z _ 2(r,\theta)}f(r\cos\theta,r\sin\theta,z)\mathrm dz V∭fdv=∫αβdθ∫r1(θ)r2(θ)rdr∫z1(r,θ)z2(r,θ)f(rcosθ,rsinθ,z)dz |
| 球面坐标代换 | 3 3 3 | ρ 2 sin φ \rho^2\sin\varphi ρ2sinφ | ∭ V f d v = ∫ α β d θ ∫ φ 1 ( θ ) φ 2 ( θ ) sin φ d φ ∫ ρ 1 ( θ , φ ) ρ 2 ( θ , φ ) f ρ 2 d ρ \displaystyle\iiint\limits _ Vf\mathrm dv=\int _ \alpha ^\beta\mathrm d\theta\int _ {\varphi _ 1(\theta)}^{\varphi _ 2(\theta)}\sin\varphi\mathrm d\varphi\int _ {\rho _ 1(\theta,\varphi)}^{\rho _ 2(\theta,\varphi)}f\rho^2\mathrm d\rho V∭fdv=∫αβdθ∫φ1(θ)φ2(θ)sinφdφ∫ρ1(θ,φ)ρ2(θ,φ)fρ2dρ |
根据上面的变换式,应该很容易看出积分限该怎么确定。
重积分的应用
主要是求取曲面面积
S = ∬ D 1 + z x 2 + z y 2 d x d y (10.1) S=\iint\limits _ D\sqrt{1+z _ x^2+z _ y^2}\mathrm dx\mathrm dy\tag{10.1} S=D∬1+zx2+zy2dxdy(10.1) 如果通过 z = z ( x , y ) z=z(x,y) z=z(x,y) 求面积不方便,也可以换一个视角,比如 x = x ( y , z ) x=x(y,z) x=x(y,z) 什么的,当然前提是它存在。
曲线积分与曲面积分
曲线积分
第一型曲线积分
第一型曲线积分的值与方向无关。无论是从曲线上 A → B A\to B A→B 还是 B → A B\to A B→A,结果都应是一样的。计算过程中最麻烦的问题就是如何处理 d s \mathrm ds ds 这个弧微分,一般都是采用曲线的参数方程化为定积分。
对于空间曲线 L L L 而言,若它可以由 x = x ( t ) , y = y ( t ) , z = z ( t ) ( α ≤ t ≤ β ) x=x(t),y=y(t),z=z(t)(\alpha\leq t\leq\beta) x=x(t),y=y(t),z=z(t)(α≤t≤β) 确定,那么有
∫ L f d s = ∫ α β f ( x ( t ) , y ( t ) , z ( t ) ) x ′ 2 ( t ) + y ′ 2 ( t ) + z ′ 2 ( t ) d t (11.1) \int _ Lf\mathrm ds=\int _ \alpha^\beta f(x(t),y(t),z(t))\sqrt{x^{\prime 2}(t)+y^{\prime 2}(t)+z^{\prime 2}(t)}\mathrm dt\tag{11.1} ∫Lfds=∫αβf(x(t),y(t),z(t))x′2(t)+y′2(t)+z′2(t)dt(11.1) 这是一个比较普适的方法。其中限制条件是 x ′ 2 ( t ) + y ′ 2 ( t ) + z ′ 2 ( t ) ≠ 0 x^{\prime 2}(t)+y^{\prime 2}(t)+z^{\prime 2}(t)\neq 0 x′2(t)+y′2(t)+z′2(t)=0,这确保了 L L L 不会退化为一个点。
若 L L L 可由 x = r ( θ ) cos θ , y = r ( θ ) sin θ , z = z ( θ ) ( α ≤ θ ≤ β ) x=r(\theta)\cos\theta,y=r(\theta)\sin\theta,z=z(\theta)(\alpha\leq\theta\leq\beta) x=r(θ)cosθ,y=r(θ)sinθ,z=z(θ)(α≤θ≤β) 确定,那么有
∫ L f d s = ∫ α β f ( r ( θ ) cos θ , r ( θ ) sin θ , z ( θ ) ) r 2 ( θ ) + r ′ 2 ( θ ) + z ′ 2 ( θ ) d θ (11.2) \int _ Lf\mathrm ds=\int _ \alpha^\beta f(r(\theta)\cos\theta,r(\theta)\sin\theta,z(\theta))\sqrt{r^2(\theta)+r^{\prime 2}(\theta)+z^{\prime 2}(\theta)}\mathrm d\theta\tag{11.2} ∫Lfds=∫αβf(r(θ)cosθ,r(θ)sinθ,z(θ))r2(θ)+r′2(θ)+z′2(θ)dθ(11.2) 但是,不是所有的空间曲线都能用这种柱坐标参数方程表示,所以这种方式具有一定的局限性。
第二型曲线积分
第二型曲线积分有着很多表示形式,如
∫ L F ⋅ d r = ∫ L F ⋅ τ d s = ∫ L P d x + Q d y + R d z (11.3) \int _ L\boldsymbol F\cdot\mathrm d\boldsymbol r=\int _ L\boldsymbol F\cdot\boldsymbol\tau\mathrm ds=\int _ LP\mathrm dx+Q\mathrm dy+R\mathrm dz\tag{11.3} ∫LF⋅dr=∫LF⋅τds=∫LPdx+Qdy+Rdz(11.3) 对于它的计算,往往也是采用曲线的参数方程化为定积分。
分辨第一型与第二型曲线积分 首先,在积分号下面有一个 L L L 表示积分路径的,是曲线积分;否则是定积分。在曲线积分中,一般给出 d s \mathrm ds ds 的是第一型,给出 d x , d y , d z \mathrm dx,\mathrm dy,\mathrm dz dx,dy,dz 的组合的是第二型。
Green 公式
Green 公式是计算第二型曲线积分的利器,将其转化为二重积分。遗憾的是 Green 公式所对应的曲线被限定为平面曲线。对于空间曲线,还得使用Stokes 公式才行。
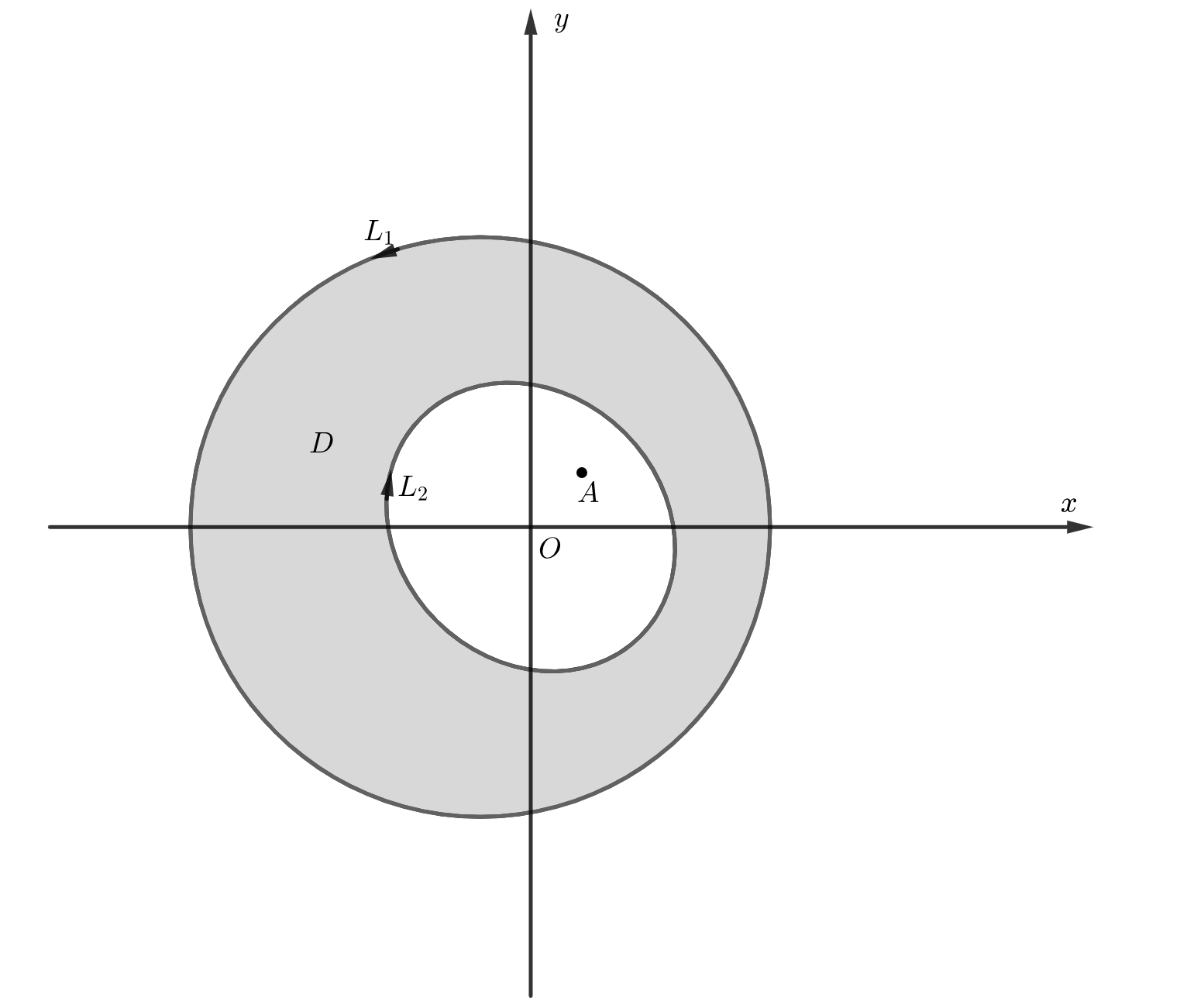
Green 公式的表述为:设区域 D D D 由 x y xy xy 平面上的简单闭曲线 L L L 围成,函数 P , Q P,Q P,Q 在 D D D 上(包含边界)有连续的一阶偏导数,则成立如下公式
∮ L P d x + Q d y = ∬ D ( Q x − P y ) d x d y = ∬ D ∣ ∂ / ∂ x ∂ / ∂ y P Q ∣ d x d y (11.4) \oint _ LP\mathrm dx+Q\mathrm dy=\iint \limits _ D(Q _ x-P _ y)\mathrm dx\mathrm dy=\iint \limits _ D\left|\begin{matrix}\partial/\partial x&\partial/\partial y\\ P&Q\end{matrix}\right|\mathrm dx\mathrm dy\tag{11.4} ∮LPdx+Qdy=D∬(Qx−Py)dxdy=D∬ ∂/∂xP∂/∂yQ dxdy(11.4) 这个连续偏导数的存在十分重要。如果 L 1 L _ 1 L1 在其内部点 A A A, P P P 或者 Q Q Q 在这一点的偏导数不连续,需要挖掉包含 A A A 的一小块区域,对 L = L 1 + L 2 L=L _ 1+L _ 2 L=L1+L2 使用 Green 公式化为区域 D D D 上的二重积分。对于 L 2 L _ 2 L2 的曲线积分,使用其他方法计算。
曲面积分
第一型曲面积分
第一型曲面积分,也不考虑曲面的“方向”问题。曲面面积元 d S \mathrm dS dS 需要经过适当的转换变为平面面积元 d σ \mathrm d\sigma dσ,从而转化为二重积分。如果曲面是 z = z ( x , y ) z=z(x,y) z=z(x,y) 的一部分,那么
∬ S f d S = ∬ D f ( x , y , z ( x , y ) ) 1 + z x 2 + z y 2 d x d y (11.5) \iint\limits _ Sf\mathrm dS=\iint\limits _ Df(x,y,z(x,y))\sqrt{1+z _ x^2+z _ y^2}\mathrm dx\mathrm dy\tag{11.5} S∬fdS=D∬f(x,y,z(x,y))1+zx2+zy2dxdy(11.5) 第一型曲面积分的直接计算方法,相对来说,没有第一型曲线积分的方法那么丰富;但是也未必总是转换到面积微元 d σ = d x d y \mathrm d\sigma=\mathrm dx\mathrm dy dσ=dxdy 上。
第二型曲面积分
第二型曲面积分也有着很多表示形式,如
∬ S F ⋅ d S = ∬ S F ⋅ n d S = ∬ S P d y d z + Q d z d x + R d x d y (11.6) \iint\limits _ S\boldsymbol F\cdot\mathrm d\boldsymbol S=\iint\limits _ S\boldsymbol F\cdot\boldsymbol n\mathrm dS=\iint\limits _ SP\mathrm dy\mathrm dz+Q\mathrm dz\mathrm dx+R\mathrm dx\mathrm dy\tag{11.6} S∬F⋅dS=S∬F⋅ndS=S∬Pdydz+Qdzdx+Rdxdy(11.6) 其矢量函数 F = { P , Q , R } \boldsymbol F=\lbrace P,Q,R\rbrace F={P,Q,R}, n \boldsymbol n n 是曲面 S S S 的单位法矢量。
分辨第一型与第二型曲面积分 首先,在积分号下面有一个 S S S 代表积分曲面的的是曲面积分;否则积分号下面表示积分平面(一般用不等式或者符号 D D D),是二重积分。在曲面积分中,一般给出 d S \mathrm dS dS 的是第一型,给出 d x d y , d y d z , d z d x \mathrm dx\mathrm dy,\mathrm dy\mathrm dz,\mathrm dz\mathrm dx dxdy,dydz,dzdx 的组合的是第二型。
直接求取第二型曲面积分,一般使用分散投影法或统一投影法。统一投影法的原理是:
∬ S P d y d z + Q d z d x + R d x d y = ∬ S [ − P z x ( x , y ) − Q z y ( x , y ) + R ] d x d y (11.7) \iint\limits _ SP\mathrm dy\mathrm dz+Q\mathrm dz\mathrm dx+R\mathrm dx\mathrm dy=\iint\limits _ S[-Pz _ x(x,y)-Qz _ y(x,y)+R]\mathrm dx\mathrm dy\tag{11.7} S∬Pdydz+Qdzdx+Rdxdy=S∬[−Pzx(x,y)−Qzy(x,y)+R]dxdy(11.7) 从式 ( 11.6 ) (11.6) (11.6) 中看出,如果你能直接得到 n \boldsymbol n n 的表达式,那么就可以转换为第一型曲面积分计算。有些时候其他方法也能解决,不必费尽心思求 n \boldsymbol n n 的表达式;也有些时候这种方式可以简化计算量。
Gause 公式与 Stokes 公式
在引入这两个公式之前,首先约定了一些记号。式 ( 11.8 ) ( 11.9 ) (11.8)(11.9) (11.8)(11.9) 分别定义矢量函数 F = { P , Q , R } \boldsymbol F=\lbrace P,Q,R\rbrace F={P,Q,R} 的散度与旋度。
div F = P x + Q y + R z (11.8) \operatorname{div}\boldsymbol F=P _ x+Q _ y+R _ z\tag{11.8} divF=Px+Qy+Rz(11.8) r o t F = { R y − Q z , P z − R x , Q x − P y } (11.9) \operatorname{\bold{rot}}\boldsymbol F=\lbrace R _ y-Q _ z,P _ z-R _ x,Q _ x-P _ y\rbrace\tag{11.9} rotF={Ry−Qz,Pz−Rx,Qx−Py}(11.9) 然而旋度的计算式太难记了。引入 Hamilton 算子 ∇ = { ∂ ∂ x , ∂ ∂ y , ∂ ∂ z } \nabla=\left\lbrace\cfrac{\partial}{\partial x},\cfrac{\partial}{\partial y},\cfrac{\partial}{\partial z}\right\rbrace ∇={∂x∂,∂y∂,∂z∂} 后,可以简化为 div F = ∇ ⋅ F \operatorname{div}\boldsymbol F=\nabla\cdot\boldsymbol F divF=∇⋅F 以及 r o t F = ∇ × F \operatorname{\bold{rot}}\boldsymbol F=\nabla\times\boldsymbol F rotF=∇×F。同时梯度可以写成数乘向量 g r a d u = ∇ u \operatorname{\bold{grad}}u=\nabla u gradu=∇u。
也不能简单地将 ∇ \nabla ∇ 看作一个矢量,把 u u u 看作一个数量; ∇ \nabla ∇ 矢量在运算中不仅具有一般性,还具有特殊性。
特殊性可以从以下的 Leibniz 规则中看出: ∇ ( u v ) = v ∇ u + u ∇ v \nabla(uv)=v\nabla u+u\nabla v ∇(uv)=v∇u+u∇v ∇ ⋅ ( u F ) = ∇ u ⋅ F + u ∇ ⋅ F \nabla\cdot(u\boldsymbol F)=\nabla u\cdot\boldsymbol F+u\nabla\cdot\boldsymbol F ∇⋅(uF)=∇u⋅F+u∇⋅F ∇ × ( u F ) = ∇ u × F + u ∇ × F \nabla\times(u\boldsymbol F)=\nabla u\times\boldsymbol F+u\nabla\times\boldsymbol F ∇×(uF)=∇u×F+u∇×F ∇ ⋅ ( F × G ) = ( ∇ × F ) ⋅ G − F ⋅ ( ∇ × G ) \nabla\cdot(\boldsymbol F\times\boldsymbol G)=(\nabla\times\boldsymbol F)\cdot\boldsymbol G-\boldsymbol F\cdot(\nabla\times\boldsymbol G) ∇⋅(F×G)=(∇×F)⋅G−F⋅(∇×G)
散度、旋度和梯度之间具有一些二级结论公式。
下面两个结论能够按照定义证明出来,但是可能不太好记忆: ∇ ⋅ ( ∇ × F ) = div r o t F = 0 \nabla\cdot(\nabla\times\boldsymbol F)=\operatorname{div}\operatorname{\bold{rot}}\boldsymbol F=0 ∇⋅(∇×F)=divrotF=0 ∇ × ∇ u = r o t g r a d u = 0 \nabla\times\nabla u=\operatorname{\bold{rot}}\operatorname{\bold{grad}}u=0 ∇×∇u=rotgradu=0 下面这个计算结果也记为 Δ u \Delta u Δu,其中 Δ \Delta Δ 是 Laplace 算子: ∇ ⋅ ∇ u = ∇ 2 u = u x x + u y y + u z z \nabla\cdot\nabla u=\nabla^2u=u _ {xx}+u _ {yy} + u _ {zz} ∇⋅∇u=∇2u=uxx+uyy+uzz
Gause 公式
Gause 公式将空间中的闭曲面的第二型曲面积分与曲面所包围的空间区域的三重积分联系起来。这和 Green 公式类似,Green 公式将平面中的闭曲线的第二型曲线积分与曲线所包围的平面区域的二重积分联系起来。
Gause 公式的形式为
∯ S P d y d z + Q d z d x + R d x d y = ∭ V ( P x + Q y + R z ) d v (11.10) \oiint\limits _ SP\mathrm dy\mathrm dz+Q\mathrm dz\mathrm dx+R\mathrm dx\mathrm dy=\iiint\limits _ V(P _ x+Q _ y+R _ z)\mathrm dv\tag{11.10} S∬Pdydz+Qdzdx+Rdxdy=V∭(Px+Qy+Rz)dv(11.10) 或者写作
∯ S ( F ⋅ n ) d S = ∭ V ( ∇ ⋅ F ) d v (11.11) \oiint\limits _ S(\boldsymbol F\cdot\boldsymbol n)\mathrm dS=\iiint\limits _ V(\nabla\cdot\boldsymbol F)\mathrm dv\tag{11.11} S∬(F⋅n)dS=V∭(∇⋅F)dv(11.11) Gause 公式的使用也要求 P , Q , R P,Q,R P,Q,R 在 V V V(包含边界)上有连续的一阶偏导数,因此如果 V V V 内存在一阶偏导数的不连续点,仿照 Green 公式一样挖去这个点的一个邻域。
Stokes 公式
设分片光滑的定向曲面 S S S 以分段光滑的有向闭曲线 L L L 为边界, L L L 与 S S S 的定向一致;函数 P , Q , R P,Q,R P,Q,R 在 S S S(包括边界)上有连续的一阶偏导数, F = { P , Q , R } \boldsymbol F=\lbrace P,Q,R\rbrace F={P,Q,R},则
∮ L F ⋅ d r = ∬ S ( ∇ × F ) ⋅ n d S (11.12) \oint _ L \boldsymbol F\cdot\mathrm d\boldsymbol r=\iint\limits _ S(\nabla\times\boldsymbol F)\cdot\boldsymbol n\mathrm dS\tag{11.12} ∮LF⋅dr=S∬(∇×F)⋅ndS(11.12)
定向一致 若一人立于 S S S 的指定一侧沿 L L L 行进时, S S S 的指定一侧总是在左侧,则说 L L L 与 S S S 的定向一致。
在实际计算中,一般采用
∮ L P d x + Q d y + R d z = ∬ S ∣ d y d z d z d x d x d y ∂ ∂ x ∂ ∂ y ∂ ∂ z P Q R ∣ (11.13) \oint _ LP\mathrm dx+Q\mathrm dy+R\mathrm dz=\iint\limits _ S\left|\begin{matrix}\mathrm dy\mathrm dz&\mathrm dz\mathrm dx&\mathrm dx\mathrm dy\\\cfrac{\partial}{\partial x}&\cfrac{\partial}{\partial y}&\cfrac{\partial}{\partial z}\\P&Q&R\end{matrix}\right|\tag{11.13} ∮LPdx+Qdy+Rdz=S∬
dydz∂x∂Pdzdx∂y∂Qdxdy∂z∂R
(11.13) 从而转换为第二型曲面积分计算。
12 无穷级数
数项级数
级数的收敛判别法没有普遍的通式。对于特殊的数项级数,系统性地总结一下数项级数的判别法。
正项级数收敛判别法
对于正项级数 ∑ a n \sum a _ n ∑an 而言,判别法大致分为三类:
- 与已知敛散性的级数 ∑ b n \sum b _ n ∑bn 比较
- 一般形式的比较判别法。若从某项起有 a n ≤ b n a _ n\leq b _ n an≤bn,则当 ∑ b n \sum b _ n ∑bn 收敛时 ∑ a n \sum a _ n ∑an 收敛。
很多情况下,这个 ∑ b n \sum b _ n ∑bn 具有简单的形式,比如 p − p- p−级数。
- 极限形式的比较判别法。若 b n ≠ 0 b _ n\neq 0 bn=0, lim n → ∞ a n / b n = l \lim\limits _ {n\to\infty}a _ n/b _ n=l n→∞liman/bn=l,则当 0 < l < + ∞ 0< l< +\infty 0<l<+∞ 时 ∑ a n \sum a _ n ∑an 与 ∑ b n \sum b _ n ∑bn 敛散性相同。
- a n a _ n an 自身性质挖掘
- 比值法:若 lim n → ∞ a n + 1 / a n = l \lim\limits _ {n\to\infty}a _ {n+1}/a _ n=l n→∞liman+1/an=l,则级数 ∑ a n \sum a _ n ∑an 当 l < 1 l<1 l<1 时收敛,当 l > 1 l > 1 l>1 时发散。
- 根值法:若 lim n → ∞ a n n = l \lim\limits _ {n\to\infty}\sqrt[n]{a _ n}=l n→∞limnan=l,则级数 ∑ a n \sum a _ n ∑an 当 l < 1 l<1 l<1 时收敛,当 l > 1 l > 1 l>1 时发散。
- 数列 { a n } \lbrace a _ n\rbrace {an} 拓展为函数 f ( x ) f(x) f(x):设 f ( x ) f(x) f(x) 在区间 [ 1 , + ∞ ) [1,+\infty) [1,+∞) 上非负且单调递减, a n = f ( n ) ( n = 1 , 2 , ⋯ ) a _ n=f(n)(n=1,2,\cdots) an=f(n)(n=1,2,⋯),则级数 ∑ a n \sum a _ n ∑an 收敛当且仅当反常积分 ∫ 1 + ∞ f ( x ) d x \displaystyle\int _ 1 ^ {+\infty}f(x)\mathrm dx ∫1+∞f(x)dx 收敛。
变号级数收敛判别法
一般而言都是使用 Leibniz 判别法:若 { a n } \lbrace a _ n\rbrace {an} 单调递减且收敛于零,则级数 ∑ ( − 1 ) n − 1 a n \sum(-1)^{n-1}a _ n ∑(−1)n−1an 收敛。
Cauchy 收敛准则
Cauchy 收敛准则,本身是对于数列收敛的一个描述,即数列 { a n } \lbrace a _ n\rbrace {an} 收敛的充要条件是:
∀ ε > 0 , ∃ N ∈ N + , ∀ m , n > N : ∣ a m − a n ∣ < ε \forall\varepsilon>0,\exists N\in\mathbb N^+,\forall m,n>N:|a _ m-a _ n|<\varepsilon ∀ε>0,∃N∈N+,∀m,n>N:∣am−an∣<ε
而级数 ∑ x n \sum x _ n ∑xn 收敛的充要条件又是部分和 a n = ∑ k = 1 n x k a _ n=\sum _ {k=1}^n x _ k an=∑k=1nxk 收敛,据此,可以得到级数 ∑ x n \sum x _ n ∑xn 收敛的充要条件:
∀ ε > 0 , ∃ N ∈ N + , ∀ m , n > N : ∣ ∑ k = m n x k ∣ < ε \forall\varepsilon>0,\exists N\in\mathbb N^+,\forall m,n>N:\left|\sum _ {k=m}^n x _ k\right|<\varepsilon ∀ε>0,∃N∈N+,∀m,n>N: k=m∑nxk <ε
因此,如果对于任意的 m m m,都存在 n > m n>m n>m 使得 ∣ ∑ k = m n x k ∣ > c \left|\sum _ {k=m}^n x _ k\right|>c ∣∑k=mnxk∣>c( c c c 为一个正常数),就可以判断级数发散了。
A-D 判别法
A 指的是 Abel 判别法,D 指的是 Dirichlet 判别法。
Abel 判别法 如果数列 { a n } \lbrace a _ n\rbrace {an} 单调有界, ∑ n = 1 ∞ b n \sum _ {n=1}^\infty b _ n ∑n=1∞bn 收敛,则级数 ∑ n = 1 ∞ a n b n \sum _ {n=1}^\infty a _ nb _ n ∑n=1∞anbn 收敛。
Dirichlet 判别法 设数列 { a n } \lbrace a _ n\rbrace {an} 单调趋于 0 0 0,级数 ∑ n = 1 ∞ b n \sum _ {n=1}^\infty b _ n ∑n=1∞bn 的部分和有界,则级数 ∑ n = 1 ∞ a n b n \sum _ {n=1}^\infty a _ nb _ n ∑n=1∞anbn 收敛。
这两个定理的证明比较复杂,详情可以参见这篇文章。
函数项级数
一致收敛性
有限个连续函数之和仍然是连续函数,无限个就未必了。一致收敛性是指在收敛域 B B B 上的每个点,这些函数值之和收敛到和函数的速度的一致性。一旦收敛速度不一致,即非一致收敛,和函数就会产生间断。
一致收敛性的定义 设级数 ∑ n = 1 ∞ u n ( x ) = u 1 ( x ) + u 2 ( x ) + ⋯ + u n ( x ) + ⋯ \displaystyle\sum _ {n=1}^{\infty}u _ n(x)=u _ 1(x)+u _ 2(x)+\cdots+u _ n(x)+\cdots n=1∑∞un(x)=u1(x)+u2(x)+⋯+un(x)+⋯ 在点集 A A A 上收敛, 若
∀ ε > 0 , ∃ N > 0 , ∀ n ≥ N , ∀ x ∈ A : ∣ R n ( x ) ∣ < ε \forall\varepsilon>0,\exists N>0,\forall n\geq N,\forall x\in A:|R _ n(x)|<\varepsilon ∀ε>0,∃N>0,∀n≥N,∀x∈A:∣Rn(x)∣<ε 则说级数在 A A A 上一致收敛。其中 R n ( x ) = ∑ k = n + 1 ∞ u k ( x ) R _ n(x)=\displaystyle\sum _ {k=n+1}^\infty u _ k(x) Rn(x)=k=n+1∑∞uk(x)。
使用定义证明一致收敛性往往十分困难,所以产生了一个 Weierstrass 判别法,提供一致收敛的充分条件:
Weierstrass 判别法 若存在一个收敛的正项级数 ∑ b n \sum b _ n ∑bn 使得 ∣ u n ( x ) ∣ ≤ b n ( x ∈ A , n = 1 , 2 , ⋯ ) |u _ n(x)|\leq b _ n(x\in A,n=1,2,\cdots) ∣un(x)∣≤bn(x∈A,n=1,2,⋯),则级数 ∑ u n ( x ) \sum u _ n(x) ∑un(x) 在 A A A 上绝对收敛且一致收敛。
教材上对于这个 b n b _ n bn 的阐述非常好。Weierstrass 判别法的关键是将 ∣ u n ( x ) ∣ |u _ n(x)| ∣un(x)∣ 适度放大为 b n b _ n bn,使得 b n b _ n bn 不再含 x x x。
幂级数
幂级数是特殊的函数项级数,从 Abel 定理中可以导出收敛半径 R R R 的概念,即幂级数的收敛域 B B B 为一个连续且关于原点对称的区间(忽略端点)。而对于幂级数 ∑ n = 0 ∞ a n x n \displaystyle\sum _ {n=0}^\infty a _ nx ^n n=0∑∞anxn 来说,收敛半径的确认依式 ( 12.1 ) (12.1) (12.1)。
R = lim n → ∞ ∣ a n a n + 1 ∣ (12.1) R=\lim _ {n\to\infty}\left|\cfrac{a _ n}{a _ {n+1}}\right|\tag{12.1} R=n→∞lim an+1an (12.1)
Abel 定理 如果级数 ∑ n = 0 ∞ a n x n \displaystyle\sum _ {n=0}^\infty a _ nx ^n n=0∑∞anxn 当 x = x 0 ( x 0 ≠ 0 ) x=x _ 0(x _ 0\neq 0) x=x0(x0=0) 时收敛,则该级数在区间 ( − ∣ x 0 ∣ , ∣ x 0 ∣ ) (-|x _ 0|,|x _ 0|) (−∣x0∣,∣x0∣) 上绝对收敛。如果级数 ∑ n = 0 ∞ a n x n \displaystyle\sum _ {n=0}^\infty a _ nx ^n n=0∑∞anxn 当 x = x 0 x=x _ 0 x=x0 时发散,则对 ∣ x ∣ > ∣ x 0 ∣ |x|>|x _ 0| ∣x∣>∣x0∣ 的 x x x 级数发散。
关于幂级数是否在 x = ± R x=\pm R x=±R 处收敛,需要单独拿出来讨论。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 17
17 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)