系统稳定性小结
李雅普诺夫函数与稳定性
(个人向小结,持续更新)
李雅普诺夫函数 :
:
在一个球内,是正定的,有连续偏导数,且沿着系统任意状态轨线倒数为负半定,那么
为系统的李雅普诺夫函数(Lyapunov function)。
局部稳定性(local Stability)以及全局稳定性(Global Stability)均可以基于给出,其中局部稳定性约束较弱,只需要在一个球内,
正定,
负半定即可。可以直观看出,由于Ly函数的下降趋势,如果状态初值取一个稳定点附近合适大小,相应地状态后续变化也不会超过一个上界,即“稳定”的定义。特别的,如果
负定,则0点(稳定点)是渐进稳定的(asymptotic stable),也很直观,导数为负,一直下降,直到趋于0.
全局稳定约束更强一点,需要将球放大到整个空间,任何与“无穷”这个概念扯上关系的理论,都要格外小心,全局稳定就需要增加径向无界(radial unboundedness)条件,即。相对而言,全局的渐近稳定性更加有意义,径向无界相当于通过约束
边界性质(即不能V沿着||x||无穷大的方向有递减的趋势,不然对于全局而言,同样也会导致系统状态不收敛)。一般来说,做工程关注局部稳定性即可。
对于非自治系统,需要变成
,有着与以上类似的性质。此外,有大量的定理去减少特定情况下李雅普诺夫函数的保守性。
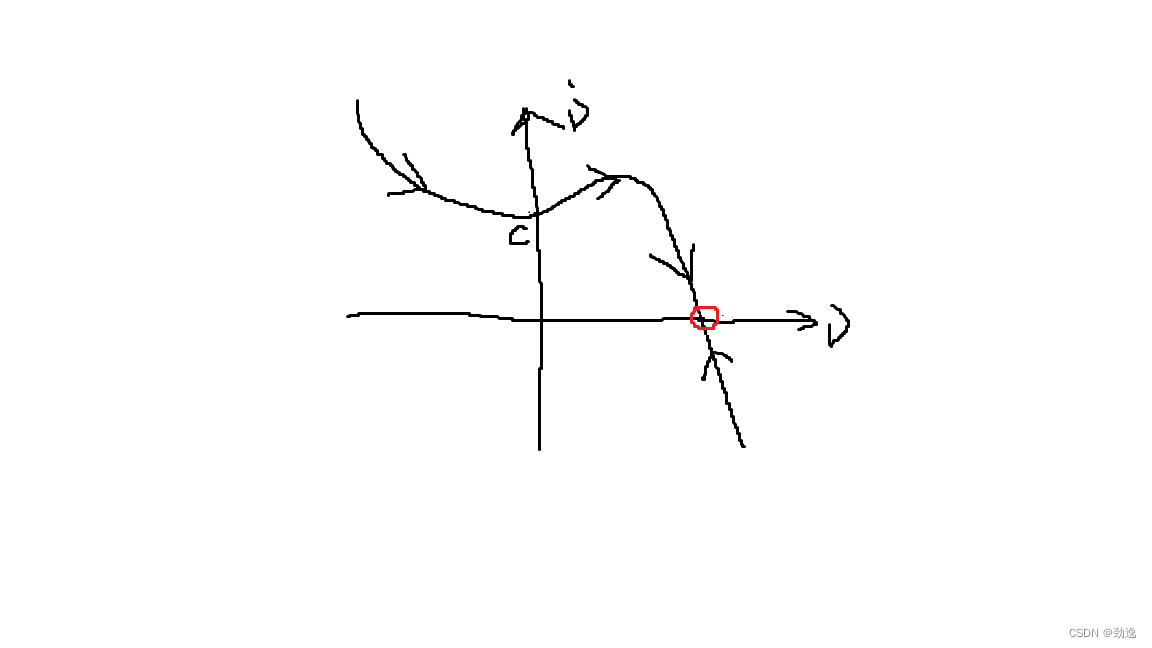
例1.分析系统(相应于物体在黏性的液体中下沉)的稳定性(来自于applied nonlinear control习题4.2):
分析:系统一阶,有着简单的非线性,有经验的话看就能看出来是稳定的。可以基于状态平方构建李雅普诺夫函数,求导可以发现还是会对进行分析。所以,不如直接分析相图。
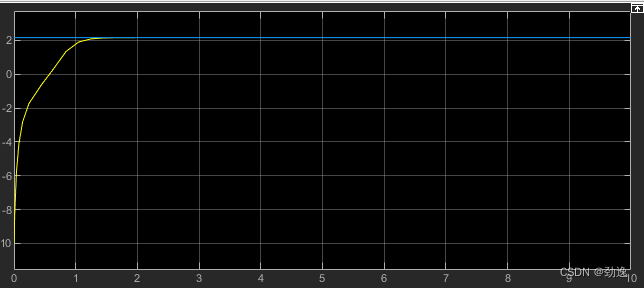
1).c>=0时,画抛物线,求根,有唯一稳定点,简单仿真一下,初值-10可以到计算的稳定点:
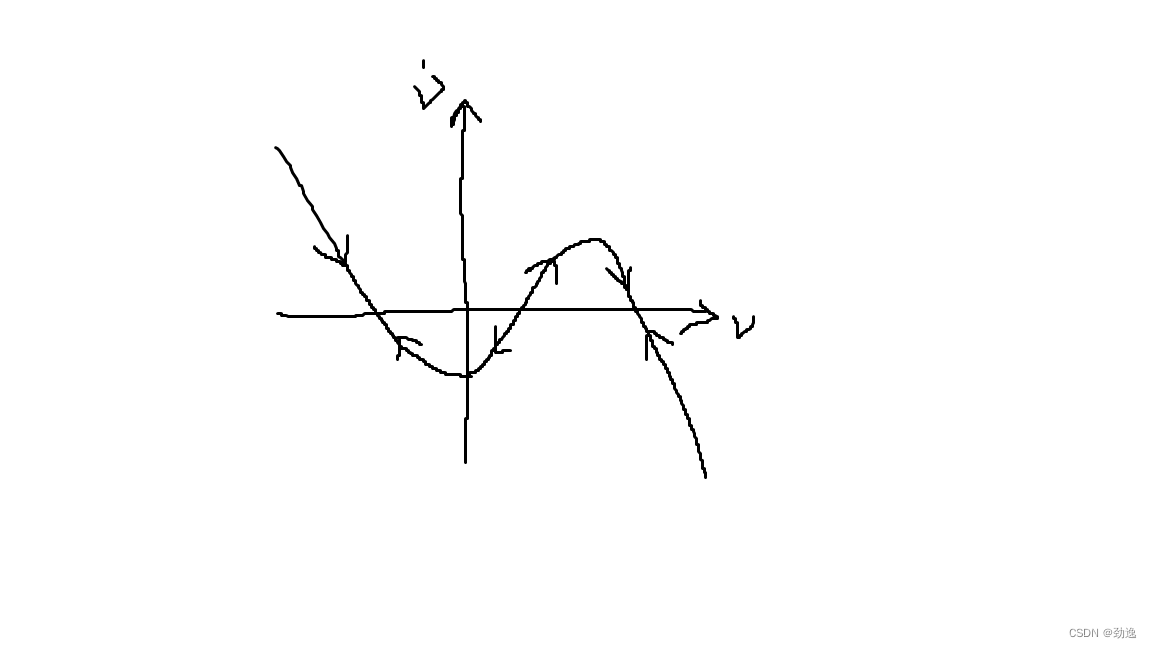
2).c<0时,有三个平衡点,两个稳定点;如果c特别大,会把抛物线拉下去,这时候就一个平衡点(稳定)。具体会收敛到哪里,初值有关
李雅普诺夫函数 :
:
上面提到均为自治系统,那么还有很多系统与时间函数g(t)有关,这种微分方程解析解很难获得。
此时李亚普诺夫函数往往会采取含有时间t的方式来构建,并与时不变的V(x)进行比较。
正定性:
这里强调的是与时不变函数做比较,判断正定,称为V(x,t) dominates V0(x)。(中文将dominate翻译为控制住,个人感觉不是很好,翻译为主导或者支配更好一点吧)。
无界性:
无界性就是找一个Vl(x) 来dominantes这个函数。
例2.说明LPV系统的稳定性:
这个例子可以看出来,虽然的特征值随时间增长,但是其依然全局渐近稳定,这说明特征值判据只能作为充分条件,特征值的dominate系统的动态还不够直接与强悍。
这个可以构建李雅普诺夫函数
求导,-dotV大于等于大于0,dotV负半定,全局渐近稳定

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)