论文阅读笔记——Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
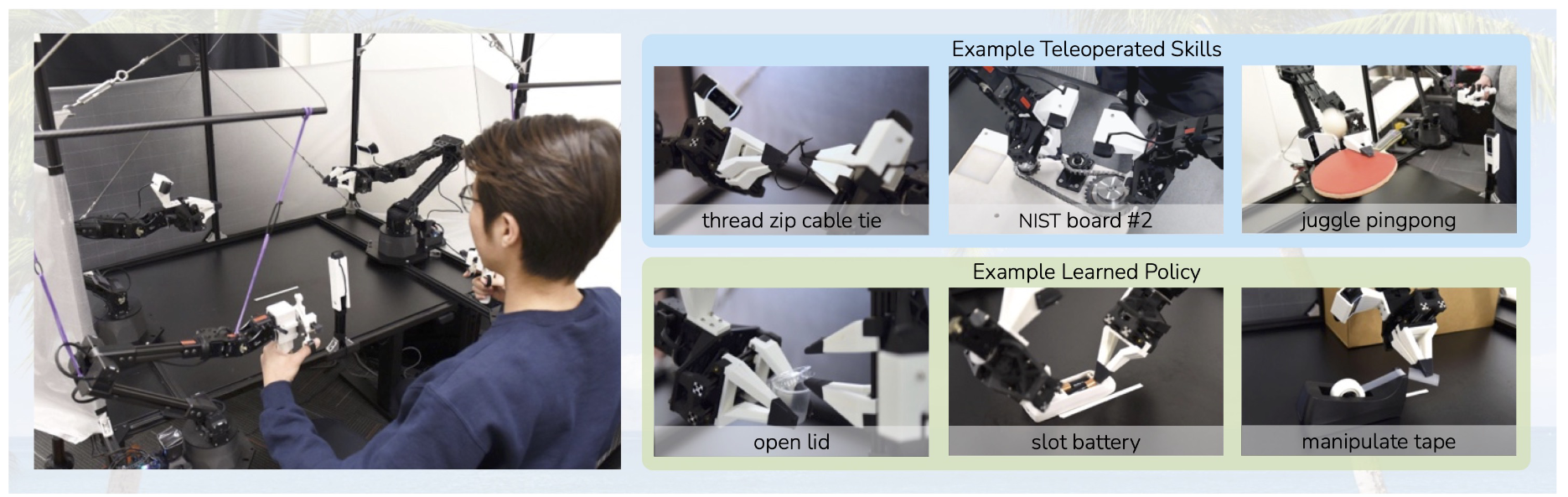
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware 论文阅读笔记
ALOHA 解决了策略中的错误可能随时间累积,且人类演示可能是非平稳的,提出了 ACT(Action Chunking with Transformers) 方法。
Action Chunking
模仿学习中,compounding error 是致使任务失败的主要原因。具体来说,当智能体(agent)在测试时遇到训练集中未见过的情况时,可能会产生预测误差。这些误差会逐步累积,导致智能体进入未知状态,最终任务失败。ALOHA 通过引入 Action Chunking 和 CVAE(Conditional Variational Autoencoder)来解决这一问题,显著减少了错误累积的影响。
在传统的模仿学习中,策略模型通常预测单步动作 π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st),即根据当前状态 s t s_t st 预测下一个动作 a t a_t at。然而,这种单步预测的方式容易导致误差累积,尤其是在长时间任务中。
为了减小 compounding error,引入了 Action Chunking,具体来说,模型不再预测单步动作,而是预测一个动作序列。
具体步骤如下:
- Chunk Size 设置:将动作序列划分为大小为 kk 的块(chunk),每 kk 步,智能体获取一次输入,并预测接下来的 k 步动作。
- 轨迹长度缩减:轨迹长度被缩小到了 1 k \frac{1}{k} k1。
- 策略模型发生变化:由预测单步 π θ ( a t ∣ s t ) \pi_\theta(a_t|s_t) πθ(at∣st) 变为 π θ ( a t : t + k ∣ s i ) \pi_\theta(a_{t:t+k}|s_i) πθ(at:t+k∣si) 。
为使轨迹更平滑,ALOHA 提出 temporal ensemble,对 k 个对同一动作的预测,采取加权的方式求和,权重 w i = e x p − m ∗ i w_i = exp^{-m*i} wi=exp−m∗i 。这种方法可以有效减少动作序列中的抖动,使动作更加平滑。
CVAE
对于 Action Chunking 中的预测,采取 condition + VAE 的方式训练,并采用 encoder-decoder 架构(transformer)。
输入信息包括:(此处不使用图像输入时为了加速训练)
- CLS 分类标签:表明类别,类似 BERT 的做法。
- 关节角:机器人当前的关节状态
- 动作序列:历史动作序列
- 位置嵌入:表示时间步的位置信息
不同之处这只是通过 encoder 来训练 decoder,在推理时丢弃 encoder 部分。
伪代码如下:


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 37
37 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)