
6轴机器人运动学(正解)
运动学正解,简而言之,就是给出6个关节变量,求得机械臂末端的位置和姿态即给出j1−j6,求x,y,z,rx,ry,rz。
理论部分
概念
运动学正解,简而言之,就是给出6个关节变量,求得机械臂末端的位置和姿态
即给出 j 1 − j 6 j_1 - j_6 j1−j6,求 x , y , z , r x , r y , r z x,y,z,rx,ry,rz x,y,z,rx,ry,rz
DH参数
只单一地给出关节值或直角坐标值,是不能直接互相转化的,还与具体的机器人有关,这部分有关的内容可以用DH参数表来表示,其描述了机器人各关节坐标系之间的关系
表中内容
连杆长度 (length) :2个相邻关节轴线之间的距离
连杆扭角 (angle) :2个相邻关节轴线之间的角度
连杆偏距 (d) :2个关节坐标系的X轴之间的距离
eg:UR5e
- DH参数表
| 关节编号 | legth(mm) | d(mm) | angle(deg) |
|---|---|---|---|
| 1 | 0 | 162.5 | 90 |
| 2 | -425 | 0 | 0 |
| 3 | -392.2 | 0 | 0 |
| 4 | 0 | 133.3 | 90 |
| 5 | 0 | 99.7 | -90 |
| 6 | 0 | 99.6 | 0 |
计算
根据DH参数表以及 j 1 − j 6 j_1 - j_6 j1−j6,建立6个关节矩阵 A 1 − A 6 A_1-A_6 A1−A6,计算出转换矩阵 T 1 − T 6 T_1-T_6 T1−T6,计算 A 1 − A 6 A_1-A_6 A1−A6相乘得到矩阵R
R = [ r o t 3 ∗ 3 P 3 ∗ 1 0 1 ∗ 3 1 ] R=\begin{bmatrix} {rot_{3*3}}&{P_{3*1}}\\ {0_{1*3}}&{1}\\ \end{bmatrix} R=[rot3∗301∗3P3∗11]
P 3 ∗ 1 = ( x , y , z ) T P_{3*1}=(x,y,z)^T P3∗1=(x,y,z)T
则求出R即求出x,y,z
关节矩阵 A i A_i Ai由当前的关节的 j i j_i ji和DH参数导出
设当前 j i j_i ji为 β \beta β,legth为 l l l,d为 d d d,angle为 α \alpha α
A i = [ c o s β − s i n β c o s α s i n β s i n α l c o s β s i n β c o s β c o s α − c o s β s i n α l s i n β 0 s i n α c o s α d 0 0 0 1 ] A_i= \left[ \begin{matrix} cos\beta & -sin\beta cos\alpha & sin\beta sin\alpha & lcos\beta \\ sin\beta & cos\beta cos\alpha & -cos\beta sin\alpha & lsin\beta \\ 0 & sin\alpha & cos\alpha & d \\ 0 & 0 & 0 & 1 \end{matrix} \right] Ai=
cosβsinβ00−sinβcosαcosβcosαsinα0sinβsinα−cosβsinαcosα0lcosβlsinβd1
R = A 1 A 2 A 3 A 4 A 5 A 6 R=A_1A_2A_3A_4A_5A_6 R=A1A2A3A4A5A6
然后再求rx,ry,rz
r o t 3 ∗ 3 = [ r 00 r 01 r 02 r 10 r 11 r 12 r 20 r 21 r 22 ] rot_{3*3}= \left[ \begin{matrix} r_{00} & r_{01} & r_{02} \\ r_{10} & r_{11} & r_{12} \\ r_{20} & r_{21} & r_{22} \\ \end{matrix} \right] rot3∗3=
r00r10r20r01r11r21r02r12r22
r x = a r c t a n ( r [ 1 ] [ 2 ] , r [ 2 ] [ 2 ] ) rx = arctan(r[1][2], r[2][2]) rx=arctan(r[1][2],r[2][2])
r y = a r c t a n ( r [ 0 ] [ 2 ] , r [ 0 ] [ 0 ] 2 + r [ 0 ] [ 1 ] 2 ) ry = arctan(r[0][2], \sqrt{r[0][0] ^2 + r[0][1]^2}) ry=arctan(r[0][2],r[0][0]2+r[0][1]2)
r z = a r c t a n ( r [ 0 ] [ 1 ] , r [ 0 ] [ 0 ] ) rz = arctan(r[0][1], r[0][0]) rz=arctan(r[0][1],r[0][0])
代码(C++)
可见https://github.com/jeekzhang/6DOF-KFS
验证(UR5e)
j . t x t : j.txt: j.txt:
| 57.3 | 57.3 | 57.3 | 57.3 | 57.3 | 57.3 |
|---|
输出:
| x | y | z | rx | ry | rz |
|---|---|---|---|---|---|
| 174.032973 | -75.257828 | -464.848688 | -106.158882 | 64.782997 | 67.592110 |
robodk C#API结果: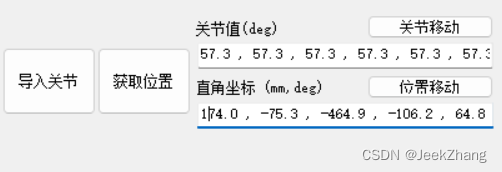
| x | y | z | rx | ry | rz |
|---|---|---|---|---|---|
| 174.0 | -75.3 | -464.9 | -106.2 | 64.8 | 67.6 |
参考资料:
6轴机器人运动学正解,逆解1
机器人导论 学习笔记2 - 运动学(正解)
欧拉角,四元数,旋转矩阵相互转化(c++, python)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)