机械臂 正解指令和逆解指令
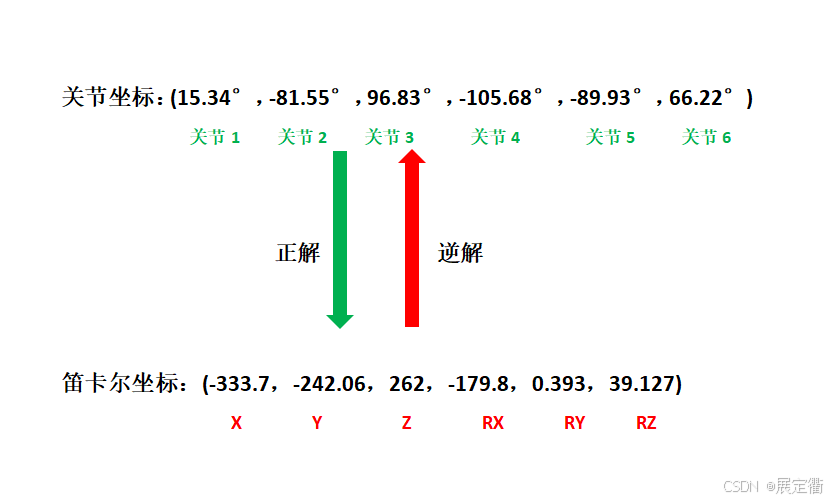
很多小伙伴不知道在机械臂的应用中,什么是正解指令,什么是逆解指令,说白了,正解指令就是把关节坐标转换成空间坐标。逆解指令就是把空间坐标转换成关节坐标。
正解指令和逆解指令
简介
很多小伙伴不知道在机械臂的应用中,什么是正解指令,什么是逆解指令,说白了,正解指令就是把关节坐标转换成空间坐标。逆解指令就是把空间坐标转换成关节坐标。
1. 正解指令
- 什么是正解指令?
正解指令根据机械臂各关节的角度,计算出机械臂末端执行器在笛卡尔空间中的位置和姿态。
2. 逆解指令
- 什么是逆解指令?
逆解指令的主要用途是根据机械臂末端执行器的目标位置和姿态,计算出各个关节需要转动的角度。
3 .用途
3.1 正解指令的用途:
- 有助于帮助工程师完成任务
有助于工程师对机械臂的运动范围、工作空间进行分析和建模,从而在设计阶段确定机械臂是否能够满足特定任务的要求。
- 避障与碰撞检测:
在机械臂运动过程中,为了避免与周围环境或其他物体发生碰撞,可以利用逆解指令结合传感器信息进行避障规划。当传感器检测到障碍物时,通过逆解计算出能够避开障碍物的关节角度,从而调整机械臂的运动路径。
- 轨迹跟踪:
对于一些需要机械臂末端沿着特定轨迹运动的任务,如绘制图形、切割曲线等,可以通过逆解指令将轨迹上的每个点转换为关节角度,然后控制机械臂按照这些角度运动,实现对轨迹的精确跟踪。
3.2 逆解指令的用途:
- 有助于帮助工程师完成任务
这使得机械臂能够准确地到达指定的位置,完成各种任务,如在工业生产中的零件抓取、装配、焊接等操作,以及在科研实验中的样本处理、仪器操作等。
- 避障与碰撞检测:
在机械臂运动过程中,为了避免与周围环境或其他物体发生碰撞,可以利用逆解指令结合传感器信息进行避障规划。当传感器检测到障碍物时,通过逆解计算出能够避开障碍物的关节角度,从而调整机械臂的运动路径。
- 轨迹跟踪:
对于一些需要机械臂末端沿着特定轨迹运动的任务,如绘制图形、切割曲线等,可以通过逆解指令将轨迹上的每个点转换为关节角度,然后控制机械臂按照这些角度运动,实现对轨迹的精确跟踪。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)